TMC5160T Pro V1.0¶

产品简介¶
TMC5160 是一款大功率的步进电机驱动控制芯片,外扩功率 MOS 管,最大电压可达56V,支持的步进电机范围更广,适配性更高。
产品特点¶
- 采用外部功率 MOS 管,可支持更高电压和更大的电流;
- 发热远远低于 2209、2130 等驱动;
- 更大的扭力能防止电机抖动,减少丢步发生的可能;
- 可驱动 57 步进电机;
- 采用普通驱动的板框,兼容性高,应用面广;
- 采用齿片更多的散热片,增强散热能力;
- I预留拓展接口,增强 DIY 的可能性;
产品参数¶
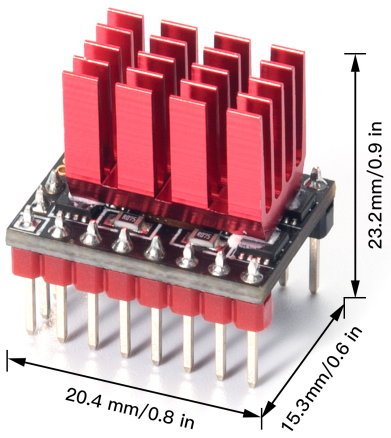
- 外观尺寸: 20.4mmx15.3mmx23.2mm
- 驱动芯片: TMC5160-TA
- 输入电压(VM): 8V-56V(TMC5160T Pro)、8V-24V(TMC5160T)
- 最大电流:RMS-3.1A,峰值 4.4A(座子的能承受的最大电流为 3A)
- 最大细分:256
- 工作模式:SPI
外设接口¶
尺寸图¶
接口示意图¶

| J1 | 功能 | J2 | 功能 |
|---|---|---|---|
| 1 | (EN) 使能 | 1 | (VM) 电机供电电压 |
| 2 | (SDI/CFG1) 数据 | 2 | (GND) 接地 |
| 3 | (SCK/CFG2) 时钟 | 3 | (A2) A 相 |
| 4 | (CSN/CFG3) 片选 | 4 | (A1) A 相 |
| 5 | (SDO/CFG0) 数据 | 5 | (B2) B 相 |
| 6 | (CLK) 外部时钟输入 | 6 | (B1) B 相 |
| 7 | (STEP) 脉冲输入 | 7 | (VIO) 逻辑电压 |
| 8 | (DIR) 方向输入 | 8 | (GND) 接地 |
接口介绍¶
安装方式及接口¶
驱动上有白色方框的引脚为使能(EN)引脚如下图红色方框所示:

固件设置¶
Marlin固件设置¶
特别注意:目前只有 Marlin2.0 及以上的固件支持 TMC5160 的 SPI 模式。
步骤一:
在 marlin 2.0 固件里找到并打开“Configuration.h”文件,然后找到“#define MOTHERBOARD XXXXXX”“XXXXX”代表所使用板子的型号。确认自己所使用的主板。

步骤二:
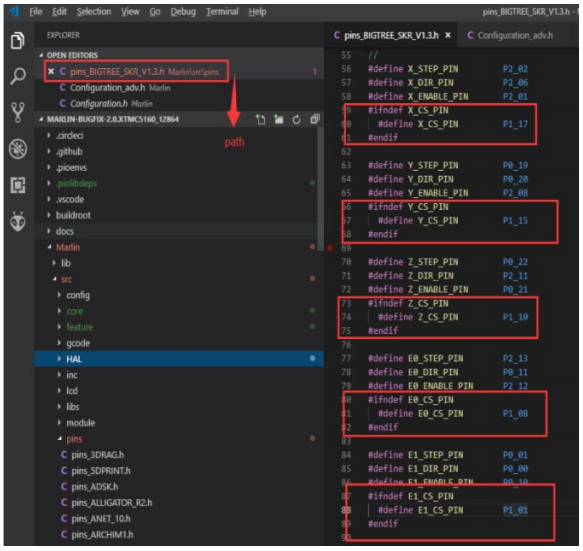
在 Marlin\src\pins 目录下找到自己板子所对应的“pins_xxxxxx.h”文件(xxxx 代表 板子型号),然后在该文件下找到
- X_CS_PIN
- Y_CS_PIN
- Z_CS_PIN
- E0_CS_PIN
等,修改后面的引脚名为自己所使用的引脚。
步骤三:
在步骤二的文件下找到
#define TMC_SW_MOSI XXX
#define TMC_SW_MISO XXX
#define TMC_SW_SCK XXX
修改为自己所要使用的引脚。

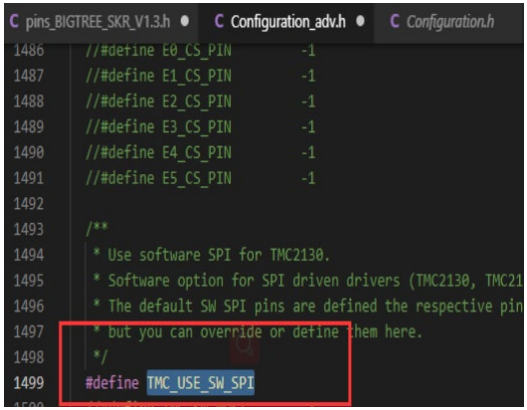
步骤四:
找到并打开“Configuration_adv.h”,然后找到“#define TMC_USE_SW_SPI” 去掉屏蔽符“//”
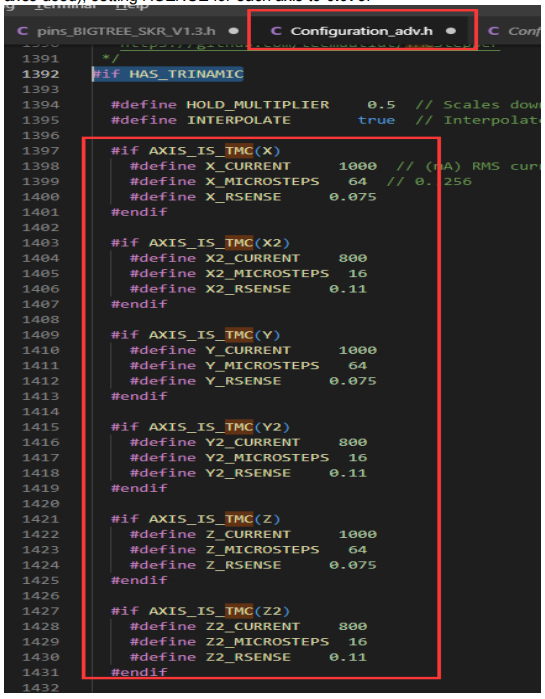
步骤五:
在“Configuration_adv.h”文件下,找到“#define X_CURRENT”“#define X_MICROSTEPS”“#define X_RSENSE”修改后面的参数(所使用到的轴都需要修改),所使 用到的轴的 RSENSE 都应改为“0.075”
步骤六:
步骤五的修改完成后,找到并打开“Configuration.h”然后找到“#define DEFAULT_AXIS_STEPS_PER_UNIT”修改后面的参数来设置细分,该地方的细分必须与步骤 五的细分对应。
细分计算方法,“80,80,400,96”代表 16 细分,如果修改为 32 细分就为“80(32/16),80(32/16),400(32/16),96(32/16)”

本产品使用的采样电阻为 0.075R,因此本产品驱动电流的最大有效值为 3.1A。
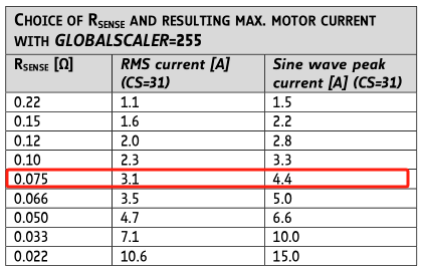
如果需要使用更大的电流,则需要自行更换采样电阻的大小(需自己准备元件和焊接)。
更换的电阻不要小于 0.066R(受模块大小限制)。
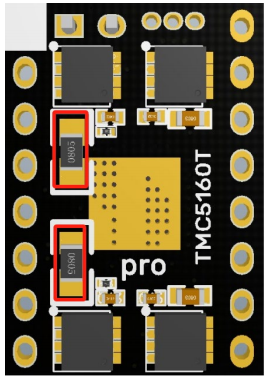
注:不建议更换电阻,如果一定要更换,在更换过程中造成驱动的损坏,需自行承 担后果。
更换的的元件位置如下图红色方框所示:
注意事项¶
-
安装驱动前一定要断开电源,防止驱动烧毁;
-
安装驱动前一定要确认驱动的方向,防止反接导致驱动不工作;
-
请不要带电插拔驱动模块,以免造成损坏;