EBB 系列¶
编译固件¶
1.通过ssh连接到Raspberry Pi后,在命令行键入以下句子:
使用以下配置编译固件(如果以下选项不可用,请将Klipper固件源更新为最新版本
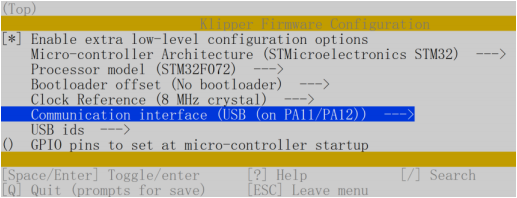
注意: EBB36/EBB42 VersionV1.0
[*] Enable extra low-level configuration options
Micro-controller Architecture (STMicroelectronics STM32) --->
Processor model (STM32F072) --->
Bootloader offset (No bootloader) --->
Clock Reference (8 MHz crystal) --->
If using USB communication over Type-C
Communication interface (USB (on PA11/PA12)) --->
If using CANBus communication
Communication interface (CAN bus (on PB8/PB9)) --->
(1000000) CAN bus speed
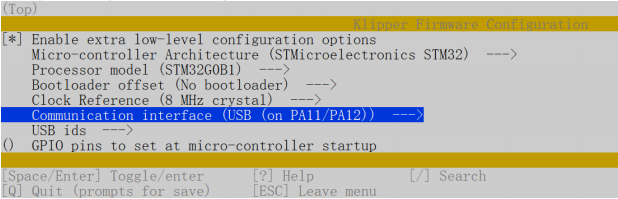
注意: EBB36/EBB42 VersionV1.1
[*] Enable extra low-level configuration options
Micro-controller Architecture (STMicroelectronics STM32) --->
Processor model (STM32G0B1) --->
Bootloader offset (No bootloader) --->
Clock Reference (8 MHz crystal) --->
If using USB communication over Type-C
Communication interface (USB (on PA11/PA12)) --->
If using CANBus communication
Communication interface (CAN bus (on PB0/PB1)) --->
(1000000) CAN bus speed
注意:仅在https://github.com/Klipper3d/klipper/pull/5488被合并到Klipper的主要分支,官方固件将支持STM32G0B1的CAN总线功能。如果您使用CANBus通信,您可以使用我们在GitHub上编译的firmware_CANBus.bin,也可以使用我们的源代码自己编译:https://github.com/bigtreetech/klipper/tree/stm32g0b1-canbus
2.配置完成后,键入“q”退出配置界面。当被问及是否保存配置时,选择“是”
3.输入make以编译固件。我们需要的“klipper.bin”固件将在Raspberry pi的home/pi/klipper/out文件夹中生成。固件位于SSH软件的左侧,用户可以直接将其下载到计算机上。

更新固件¶
NOTE: EBB36/EBB42 VersionV1.0¶
通过Raspberry Pi更新固件(将板插入计算机并进入DFU模式后,您也可以通过STM32CubeProgramer软件进行更新)。
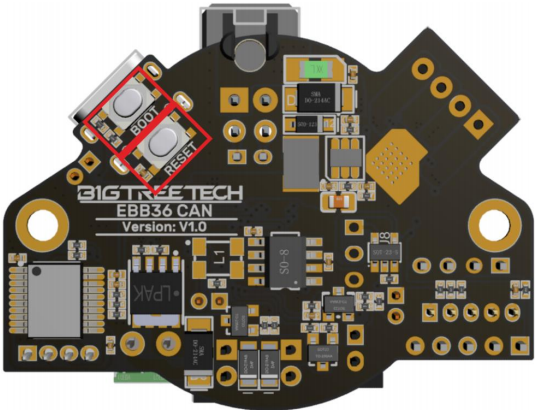
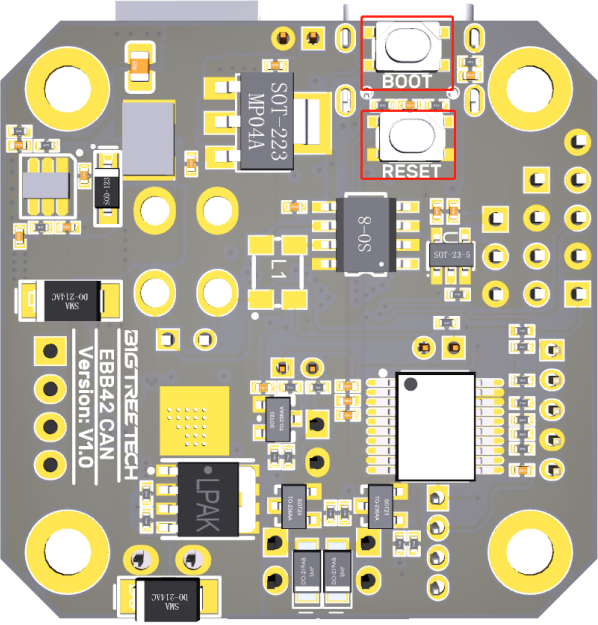
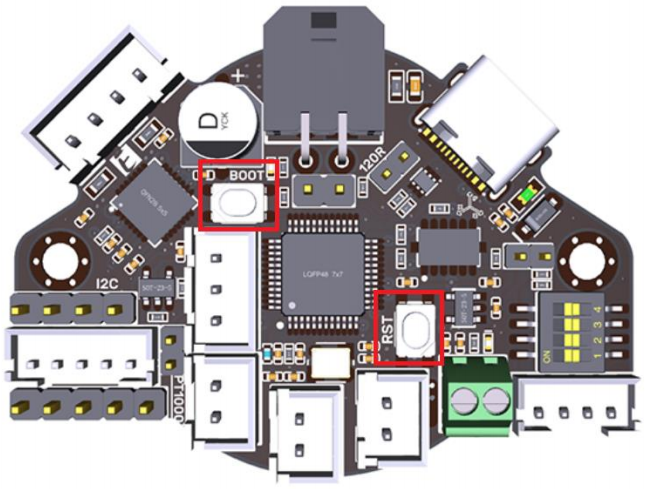
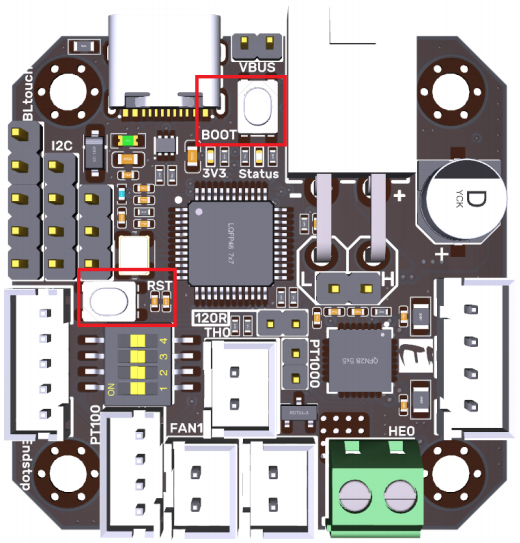
1.按下Boot(引导)按钮,然后单击Reset(重置)按钮进入DFU模式。
版本:EBB36 V1.0
版本:EBB42 V1.0
2.在ssh终端命令行中键入“lsusb”以查询DFU设备的ID。

3.键入“make flash flash_DEVICE=0483:df11”以下载固件(注意:将0483:df11替换为上一步骤中查询的DFU设备的实际ID)。
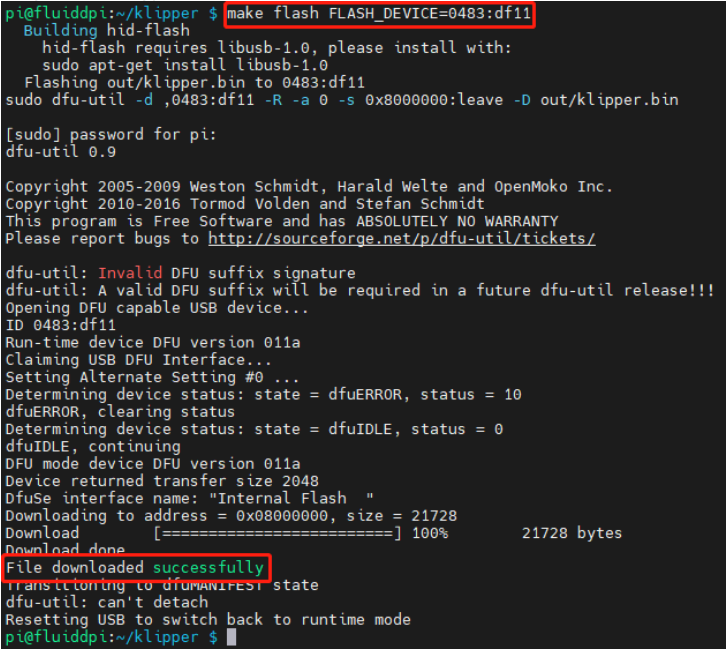
4.键入“ls/dev/serial/by-id/”以在下载完固件后查询设备的串行id(串行id仅在通过USB通信时存在。通过CAN总线通信时忽略此步骤)。

5.第一次下载固件后,再次更新固件时无需再次按下引导和重置按钮即可进入DFU模式。用户可以键入
make flash FLASH_DEVICE= /dev/serial/by-id/usb-Klipper_stm32f072xb_28002D001557434338313020-if00
下载固件(注意:将“/dev/serial/by-id/xxx”替换为上一步骤中查询的实际id)

注意: EBB36/EBB42 VersionV1.1¶
警告:当使用DFU通过Type-C端口更新固件时,STM32G0B1CB需要跳转到系统内存区域以运行bootloader(STMicroelectronics编写)。参考手册AN2606中的说明
(https://www.st.com/content/ccc/resource/technical/document/application_note/b9/9b/16/3a/12/1e/40/0c/CD00167594.pdf/files/CD00167594.pdf/jcr:content/translations/en.CD00167594.pdf), 该引导加载程序的初始化过程如下图所示:

USART的IO将在进入USB DFU模式之前进行配置。
进入DFU模式后,PA2将被系统内存区域的引导加载程序配置为输出高电平,请参阅STM32G0B1CB的数据表
(https://www.st.com/resource/en/datasheet/stm32g0b1cb.pdf)
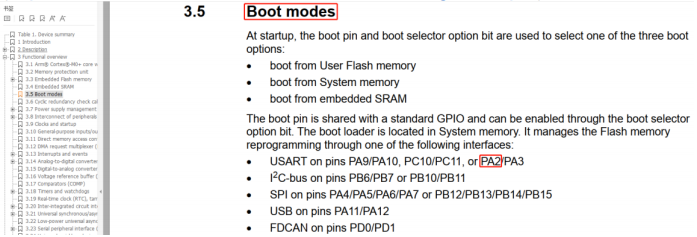
PA2用于EBB36 CAN V1.1和EBB42 CAN V1.1中的hotend MOSFET,DFU模式中的高电平将hotend更改为加热状态。因此,在使用Type-C端口的DFU更新固件时,请注意断开hotend的主电源VIN,或者确保固件更新很快完成并进入正常工作模式。当主电源和hotend连接时,切勿将MCU长时间保持在DFU模式*。
使用STM32CubeProgramer升级
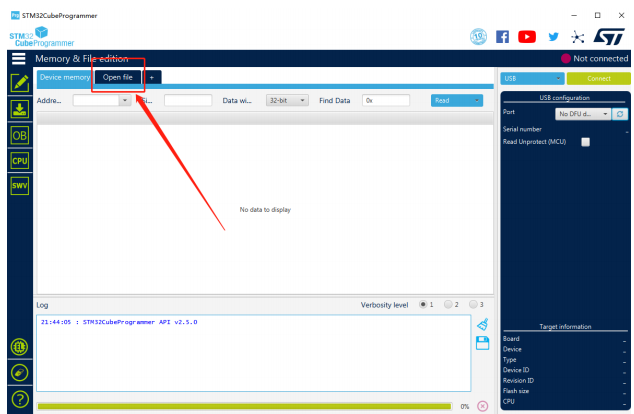
1.打开已安装的STM32CubeProgrammer,选择要下载的固件(klipper.bin)。
2.按住Boot(引导)按钮,然后单击RST(重新设置)按钮进入DFU模式。
Verison:EBB36 V1.1
Verison:EBB42 V1.1
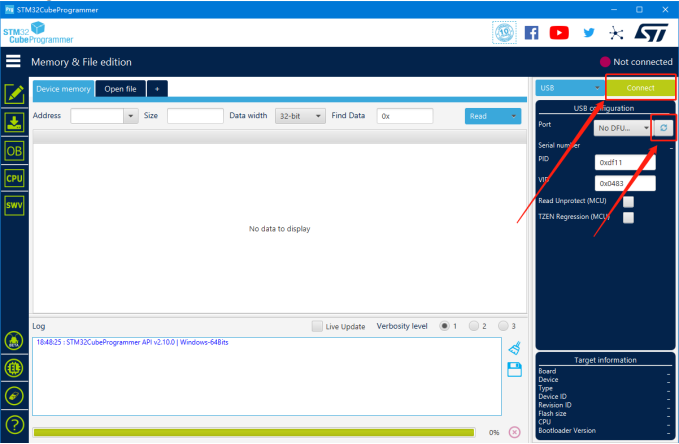
3.单击STM32CubeProgram中的“刷新”按钮,直到端口从“无DFU d…”变为“USB1”,然后单击“连接”连接芯片。
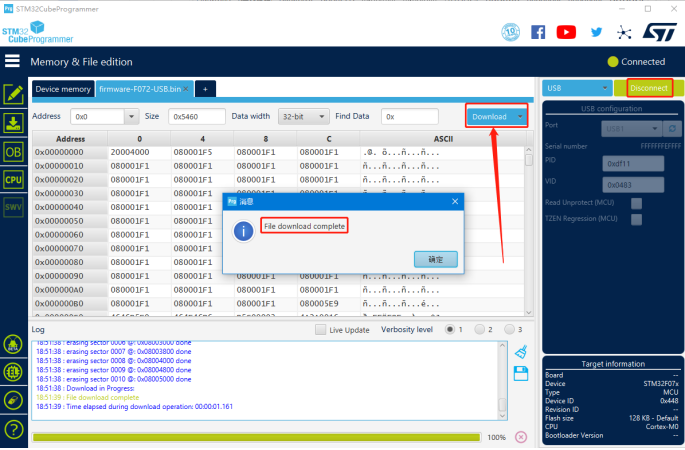
4.连接成功后,“连接”将变为“断开连接”,然后单击“下载”,下载完成后,将出现“文件下载完成”的弹出窗口,表示刻录成功。
CANBus 配置¶
与BIGTREETECH U2C模块一起使用¶
1.在ssh终端中键入以下命令“sudo nano/etc/network/interfaces.d/can0”并执行
auto can0
iface can0 can static
bitrate 1000000
up ifconfig $IFACE txqueuelen 1024
将CAN总线的速度设置为250K(必须与固件中设置的速度(1000000)CAN总线速度相同),修改后保存(Ctrl+S),然后退出(Ctrl+X)。键入命令“sudo reboot”以重新启动Raspberry Pi。
2.CANBus上的每个设备都会根据MCU的ID生成一个CANBus_uuid。如果用户想找到每个微控制器的ID,请确保硬件已通电并正确接线,然后运行以下命令:
~/klippy-env/bin/python ~/klipper/scripts/canbus_query.py can0
3.如果检测到未初始化的CAN设备,上述命令将报告该设备的canbus_uuid:
Found canbus_uuid=0e0d81e4210c
4.如果Klipper工作正常并且连接到设备,那么它不会报告canbus_uuid,这也是正常的。
与BIGTREETECH RPI-CAN HAT模块一起使用¶
1.键入并运行以下命令“sudo nano/boot/config.txt”,并在文件config.txt中添加以下内容。
dtparam=spi=on
dtoverlay=mcp2515-
can0,oscillator=12000000,interrupt=25,spimaxfrequency=1000000
修改后,保存“(Ctrl+S)”并存在“(Ctrl+X)”,键入sudo reboot以重新启动Raspberry Pi。
2.键入并运行命令“dmesg|grep-i”\(can|spi\)“”以测试RPI-can HAT模块是否正常连接。正常响应应如下所示:
[ 8.680446] CAN device driver interface
[ 8.697558] mcp251x spi0.0 can0: MCP2515 successfully initialized.
[ 9.482332] IPv6: ADDRCONF(NETDEV_CHANGE): can0: link becomes ready

3.在ssh终端上键入“sudo nano/etc/network/interfaces.d/can0”,然后运行该命令。
auto can0
iface can0 can static
bitrate 1000000
up ifconfig $IFACE txqueuelen 1024
将CAN总线的速度设置为250K(必须与固件中设置的速度相同(1000000)CAN总线速度)。修改后保存“(Ctrl+S)”并退出“(Ctrl+X)”。键入命令sudo reboot以重新启动Raspberry Pi。
4.CANBus上的每个设备都会根据MCU的ID生成一个CANBus_uuid。如果用户想找到每个微控制器的ID,请确保硬件已通电并正确接线,然后运行以下命令:
5.如果检测到未初始化的CAN设备,上述命令将报告该设备的canbus_uuid:
Found canbus_uuid=0e0d81e4210c
6.如果Klipper运行良好并且连接到设备,那么它不会报告canbus_uuid,这是正常的。
Klipper 配置¶
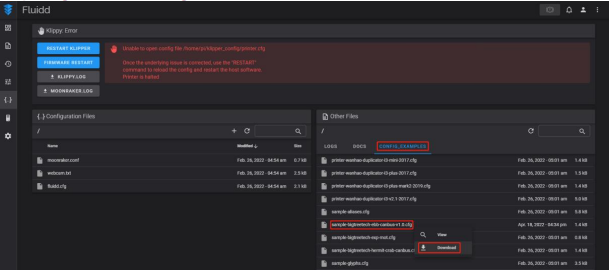
1.在电脑浏览器中输入Raspberry Pi的IP访问权限,并从文件路径下载主板的参考配置,如下图所示。如果找不到此文件,请将Klipper固件源代码更新到最新版本,或从GitHub下载:https://github.com/bigtreetech/EBB
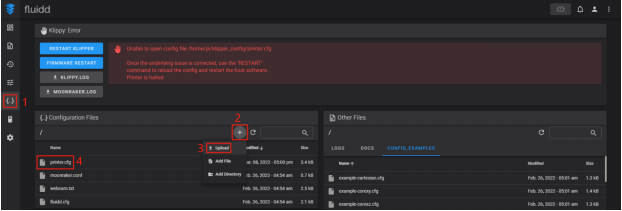
2.将主板的配置文件上传到配置文件。
3.将主板的配置添加到文件“printer.cfg”中。
[include sample-bigtreetech-ebb-canbus-v1.1.cfg]

4.将配置文件的ID号修改为主板的实际ID(USB串行或CANBus)。

5.按照以下说明配置模块的特定功能:https://www.klipper3d.org/Overview.html
注意事项¶
- 当TH0接口无法与PT1000配合使用时,您不能在其上插入跳线,否则100K NTC将无法工作。
- 当使用CAN通信时,您需要查看它是否被用作终端。如果是,则必须在120R位置插上一个跳线帽。
- DIY压接时,根据丝网布线,根据引脚和示意图进行DIY,以避免电源线反向连接或连接到CAN信号,从而烧毁模块。
- 如果在通过USB端口编程的过程中没有外部电源,则需要通过跳线将VUSB短路,以便为模块提供工作电压。
- 加热器筒和风扇接口的负载电流不得超过最大耐受电流,以防止MOS管烧坏。 -请注意4.2固件更新中的注意事项,避免主电源和hotend连接时MCU长时间处于DFU模式。
常问问题¶
Q: 加热棒和风扇接口的最大电流是多少?
A: 加热棒接口的最大输出电流:5A。
风扇接口的最大输出电流:1A。
加热棒、驱动器和风扇的总电流需要小于9A。
Q: 无法通过USB端口更新固件?
A: 您需要确保跳线帽已插入VUSB,并且板上的指示灯亮起。