Octopus MAX EZ¶

产品简介¶
BIGTREETECHOctopusMAXEZ主板是必趣创新科技(深圳)有限公司3D打印团队针对Octopus Pro优化升级的32位打印机主板,采用自主研发的步进电机驱动座子,增强安全性及用户体验,新增一系列OctopusPro不具有的功能,加大DIY可能性。
功能亮点¶
-
采用32位主频550MHz的ARMCortex-M7系列STM32H723ZET6主控芯片;
-
主板预留BOOT按键,用户可以通过DFU方式更新主板引导程序;
-
增加热敏电阻部分的保护电路,避免因热床或者加热棒漏电导致主控芯片烧毁;
-
数控风扇24V、12V、5V电压可选,省去客户外接变压模块的操作,从而减少主板损坏几率;
-
增加E-FUSE保护,反应速度快,保护力强,有效避免因为短路、过流、打火等情况造成主板烧毁;
-
可通过SD卡升级MCU固件,也可通过Klipper的makeflash命令通过DFU更新MCU固件;
-
使用十轴EZ驱动插座,避免手指被针扎破;板载TMC驱动的SPI和UART工作模式,只需通过固件设置即可使用;
-
支持断料检测、断电续打、CAN、打完关机、BLTouch、RGB灯等功能;
-
采用可更换的保险丝,方便更换;
-
预留三路四线风扇接口,且可用于连接水冷装置;
-
预留接近开关接口,支持NPN和PNP型选择,(24V,12V,5V)电压可选;
-
预留SPI拓展接口,供使用Klipper固件的客户外接加速度传感器来进行加速度补偿;
规格¶
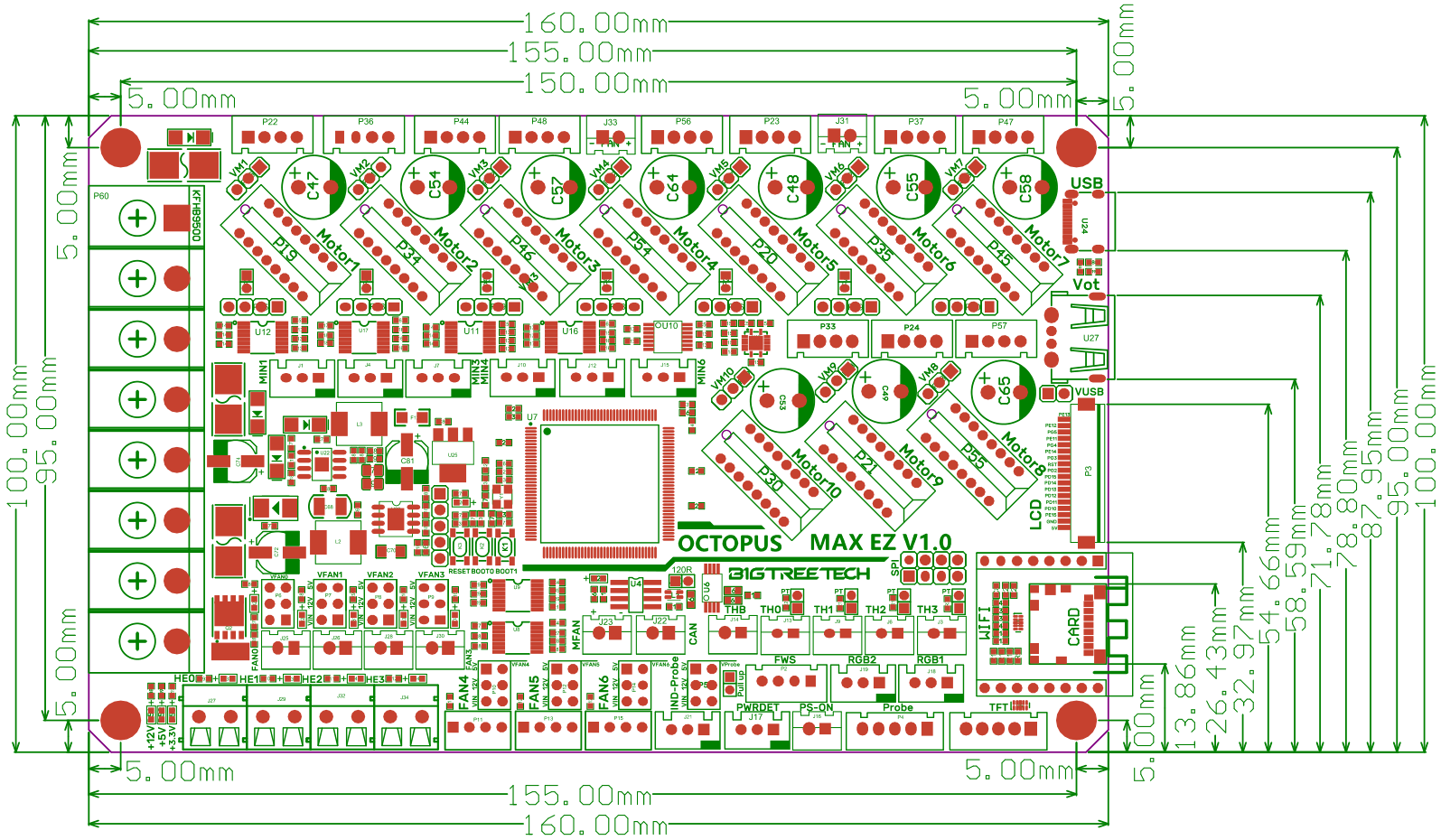
| 外观尺寸 | 160mm x 100mm 详情请参考: BIGTREETECH Octopus MAX EZ V1.0-SIZE.pdf |
|---|---|
| 安装尺寸 | 见BIGTREETECHOctopusMAXEZV1.0-SIZE.pdf |
| 微处理器 | ARMCortex-M7STM32H723ZET6550MHz |
| 驱动输入电压 | 24V,HV(≤56V)可选 |
| 主板输入电压 | VIN = DC12V或DC24V |
| 热床输入电压 | BED IN = DC12V或DC24V |
| 逻辑电压 | DC 3.3V |
| 加热接口 | 热床(HB)、加热棒(HE0,HE1,HE2,,HE3) |
| 热床端口最大输出 电流 |
10A,峰值12A |
| 加热棒端口最大输 出电流 |
5.5A,峰值6A |
| 风扇接口 | 两线数控风扇(FAN0,FAN1,FAN2,FAN3), 四线数控风扇(FAN4,FAN5,FAN6), 常开风扇(24VFANx2), 其中数控风扇和MFAN电压(5V,12V,24V)可选; |
| 风扇接口最大输出 电流 |
1A,峰值1.5A |
| 加热棒+驱动+ 风扇的总电流 |
<12A |
| 拓展接口 | BLTouch(Servos、Probe)、PS-ON、FWS、PWRDET、 RGB*2、SPI、IND-Probe、CAN、WIFI、TFT |
| 电机驱动 | 支持EZ5160、EZ2209、EZ2225、EZ2226、EZ2208、EZ2130等 |
| 驱动工作模式支持 | SPI, UART |
| 电机驱动接口 | Motor1,Motor2,Motor3(双电机接口),Motor4, Motor5,Motor6,Motor7,Motor8,Motor9,Motor10 总共10路 |
| 温度传感器接口 | 5路100KNTC,其中4路为NTC与PT1000可选端口 |
| 显示屏 | MINI12864(FPC连接)、TFT串口屏 |
| PC通信接口 | Type-C,方便插拔 |
| 支持机器结构 | Cartesian, Delta, Kossel, Ultimaker, CoreXY |
| 推荐软件 | Cura, Simplify3D, Pronterface, Repetier-host, Makerware |
尺寸¶
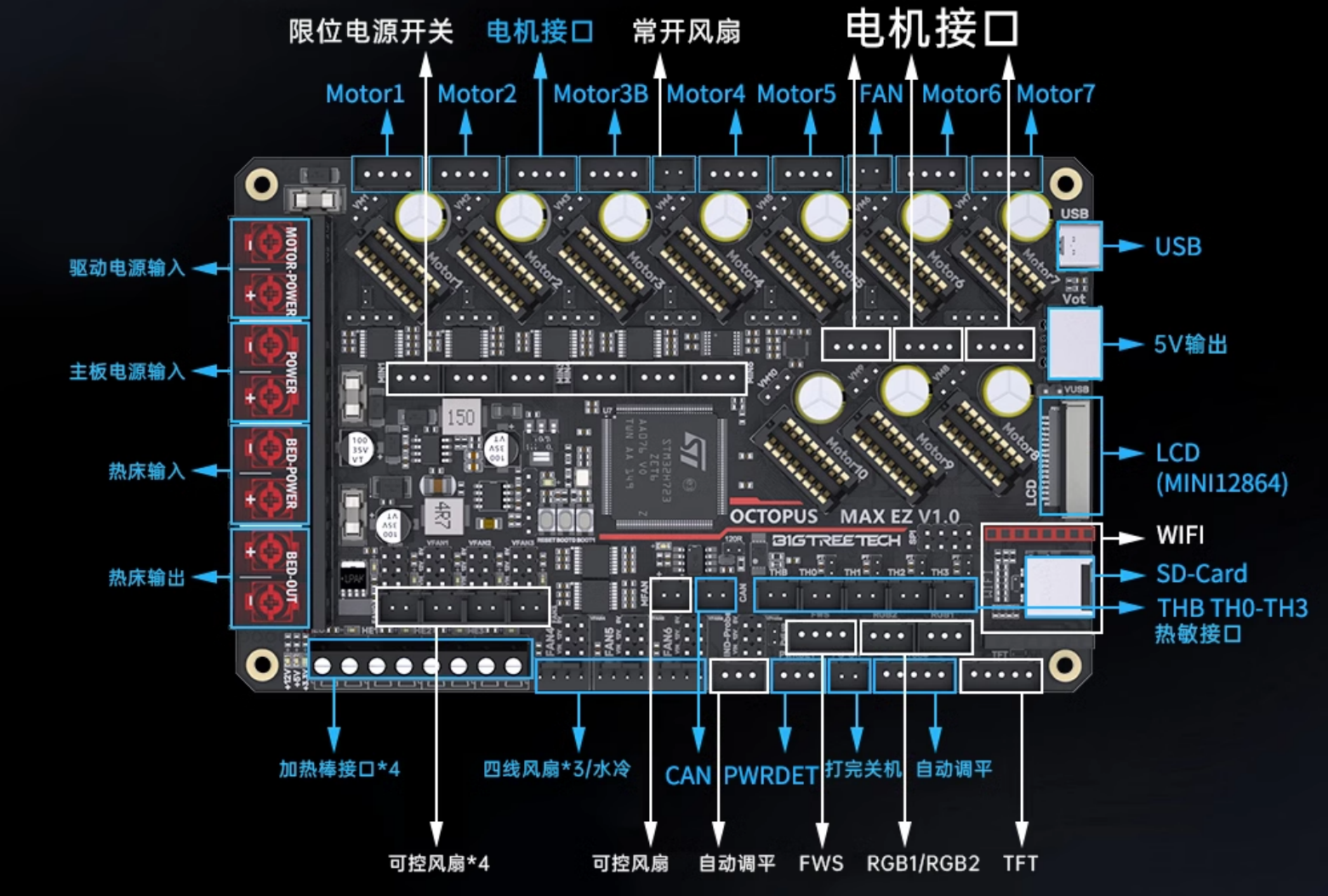
外设接口¶
接口示意图
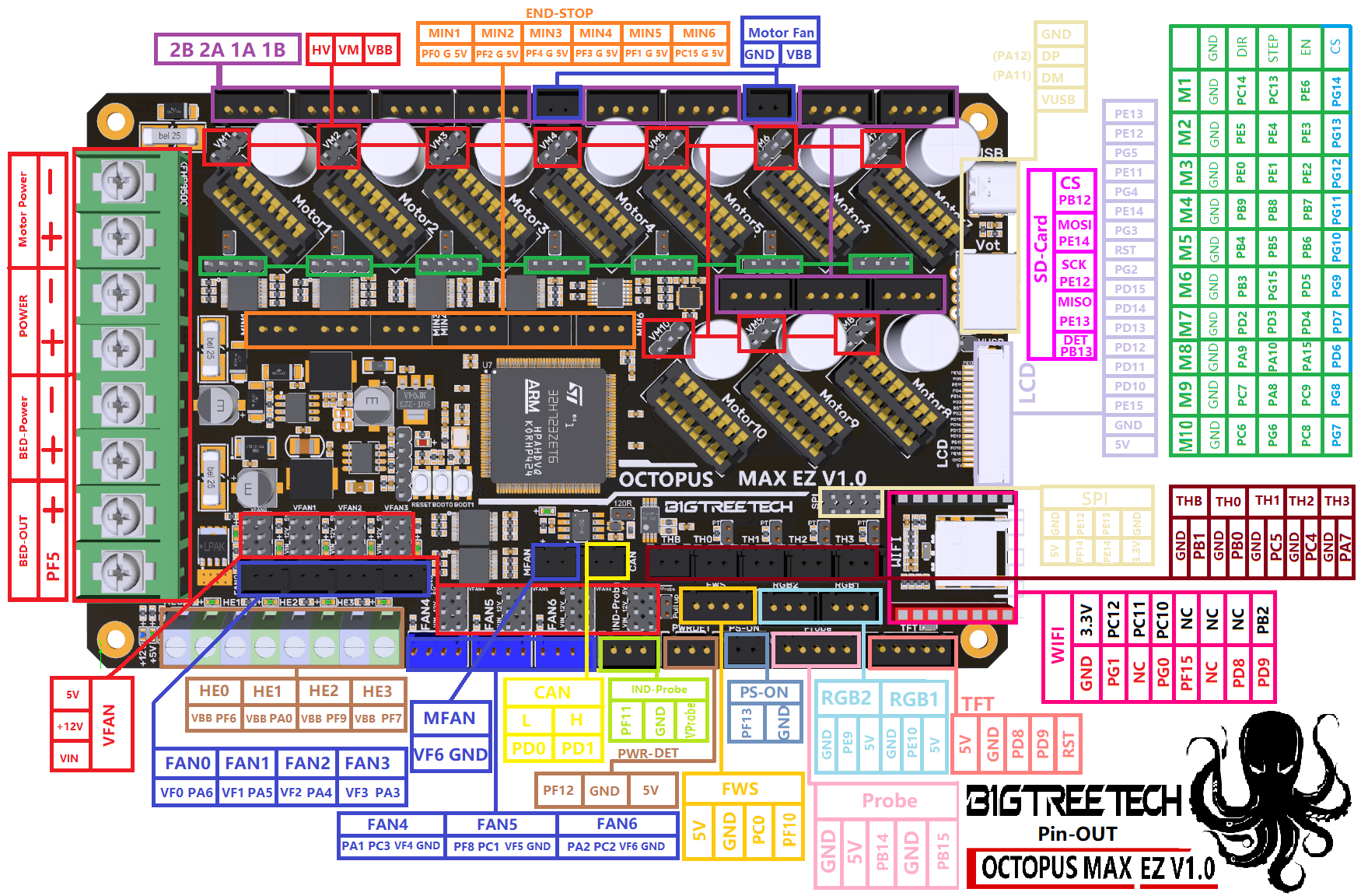
Pin脚说明¶
硬件配置¶
USB供电¶
OctopusMAXEZ主板上电之后,MCU左侧的D32红灯会亮起,表示供电正常。板子中部的VUSB是电源选择端,仅当使用USB给主板供电或需通过USB向外供电时,才需要使用跳帽将它短接。

步进电机驱动¶
驱动模式支持(UART、SPI)
通过固件直接设置,无需手动跳线帽选择。
TMC驱动的DIAG(SensorlessHoming)
如图示位置,使用SensorlessHoming功能时就插上跳帽,不使用则不插,无需剪断驱动的DIAG引脚。(Motor1-Motor6)

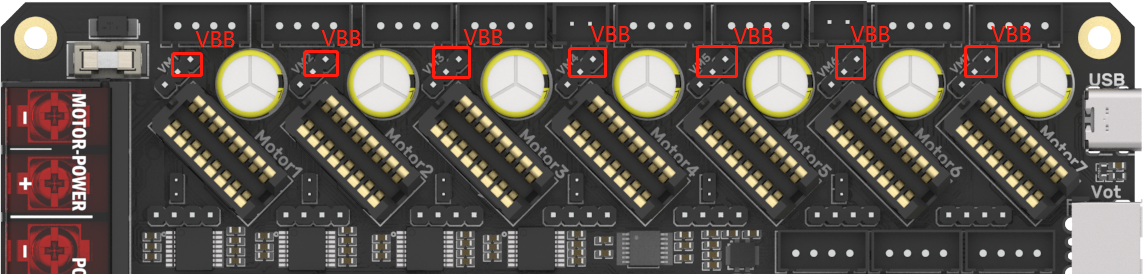
驱动电压选择

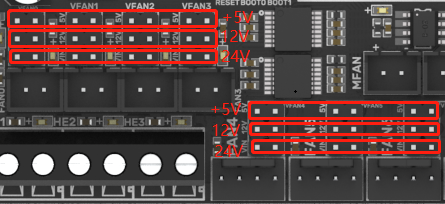
数控风扇的电压选择¶
通过跳帽来设置输出电压为5V,12V或是24V。 (其中MFAN与FAN6共用电源VFAN6).
注意:选择电压前请确认风扇支持的电压为哪一档,因选错导致的风扇烧毁,我司不与承责。
100KNTC或PT1000设置¶
使用100KNTC热敏电阻时,无需插入跳线帽,此时TH0-TH3的上拉电阻为4.7K0.1%。使用PT1000时,需使用跳帽短接下图红框中的两Pin,并联了4.12K0.1%电阻,此时TH0-TH1的上拉电阻为2.2K。
(注意:此种方式读出的温度精度会比MAX31865差很多。)

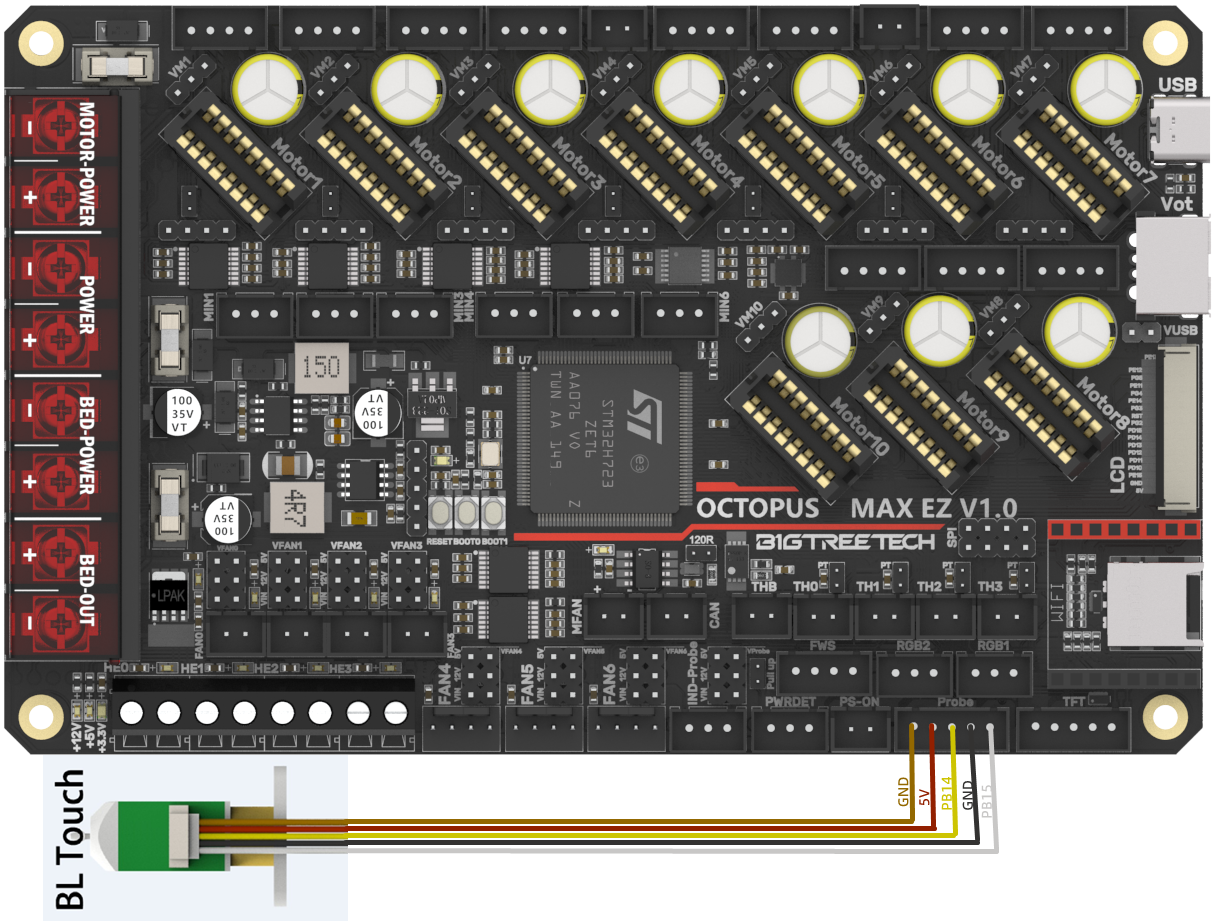
BLTouch 接线¶
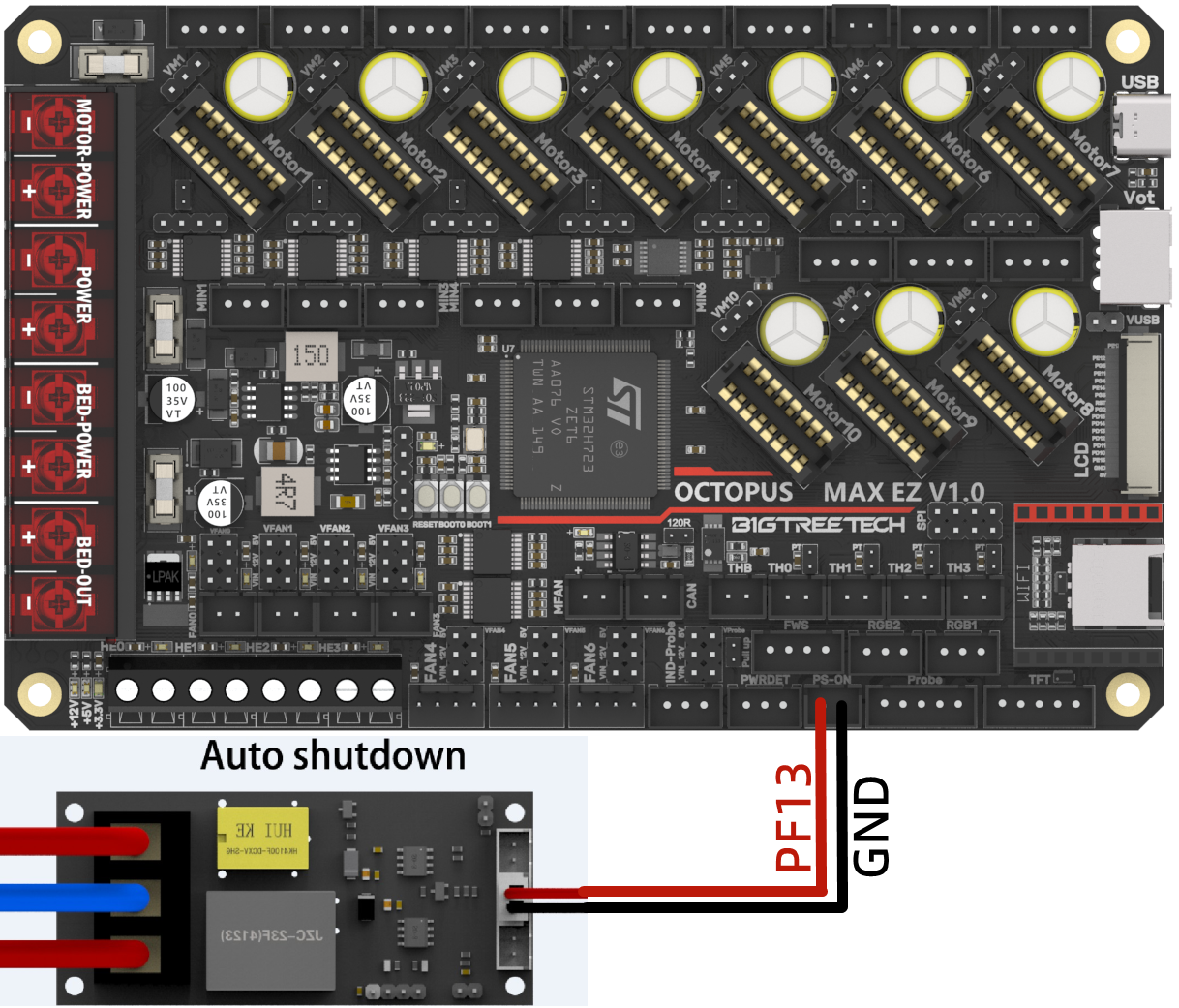
打完关机模块(RelayV1.2)接线¶
与MINI12864屏和TFT屏的接线¶

RGB 接线¶

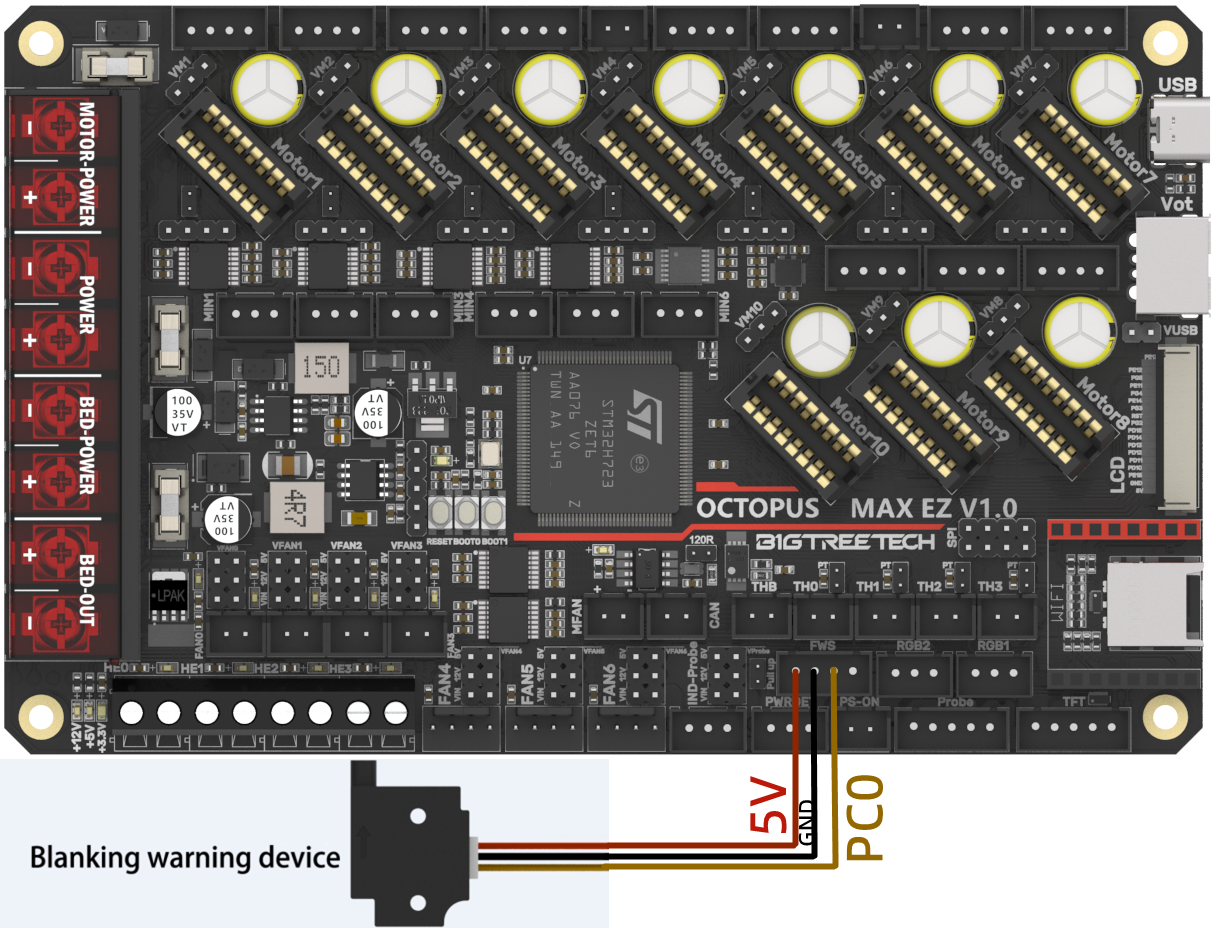
断料检测 接线¶
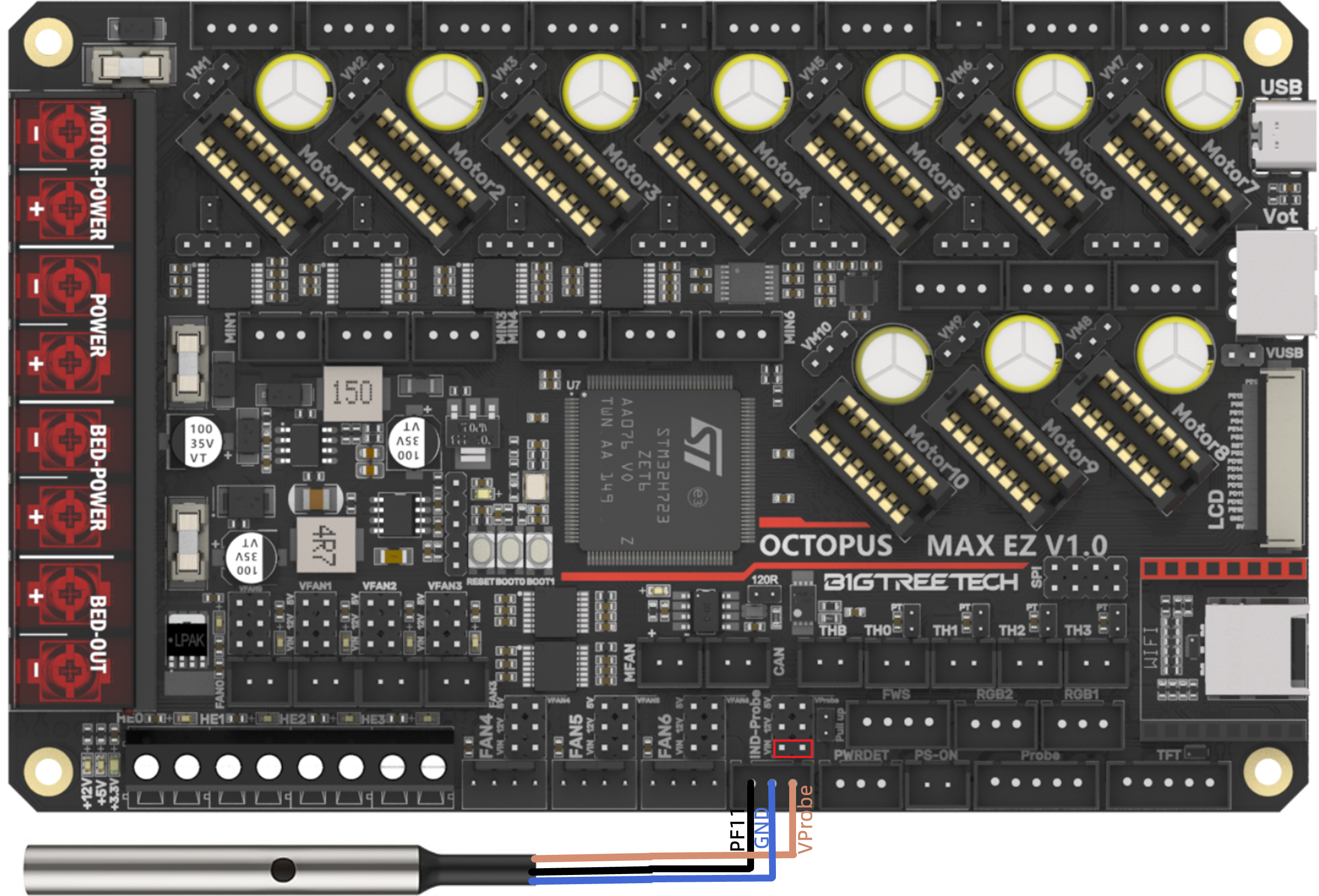
接近开关的连接¶
常开(NPN型),不用通过跳线帽短接,如下图24V为例:
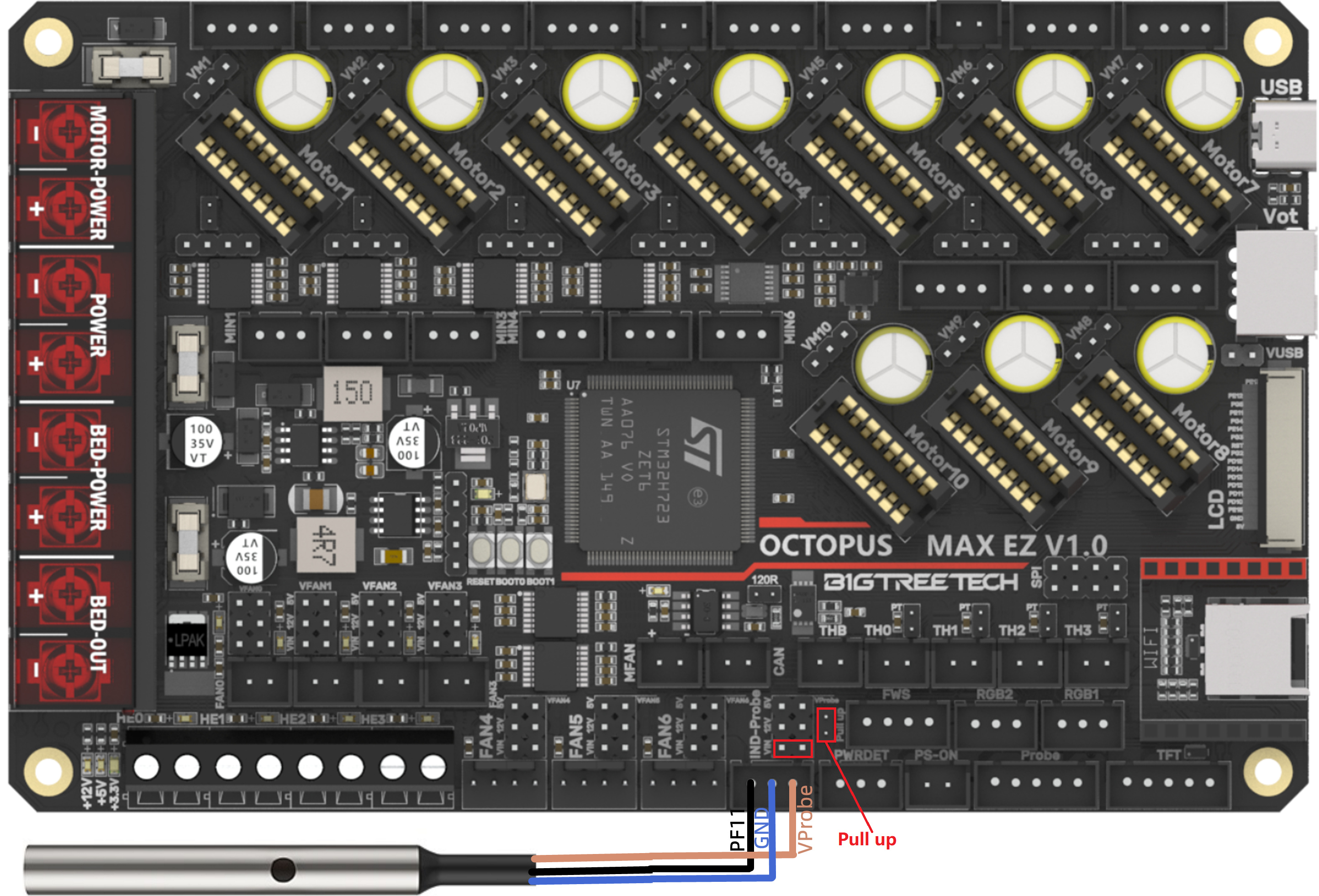
常闭(PNP型),需要将跳线帽短接,如下图24V为例:
四线数控风扇及水冷装置的连接¶
(下图以12V为例:)

软件安装¶
Marlin¶
安装编译环境¶
https://github.com/bigtreetech/Document/blob/master/How%20to%20install%20VScode%2BPlatformio.md
https://marlinfw.org/docs/basics/install_platformio_vscode.html
参考这两个链接的说明安装VSCode以及PlatformIO插件(国内的用户在线安装PlatformIO插件可能会很慢)
下载Marlin固件¶
1.从Marlin官网下载最新版本的bugfix版本的固件: https://github.com/MarlinFirmware/Marlin/tree/bugfix-2.0.x
2.从我们GitHub上下载预先配置好编译环境和主板类型的固件: https://github.com/bigtreetech/BIGTREETECH-OCTOPUS-Max-EZ
配置固件¶
打开Marlin工程
您可以通过以下几种方式之一在VSCode中打开Marlin:
- 将下载的MarlinFirmware文件夹拖到VSCode应用程序图标上;
- 使用VSCodeFile菜单中的Open...命令;
- 打开PIOHome选项卡,然后单击OpenProject按钮;
配置编译环境
打开platformio.ini文件并将default_envs修改为STM32H723Zx_btt

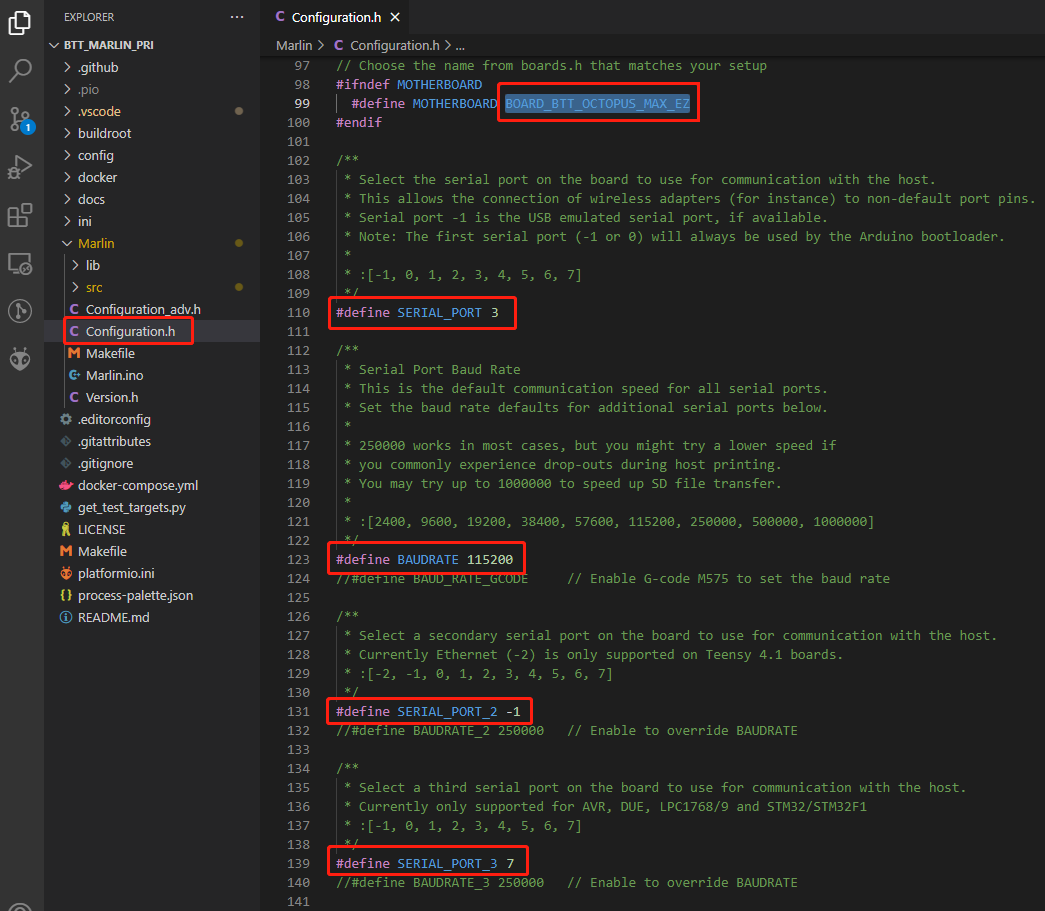
配置主板类型、串口号
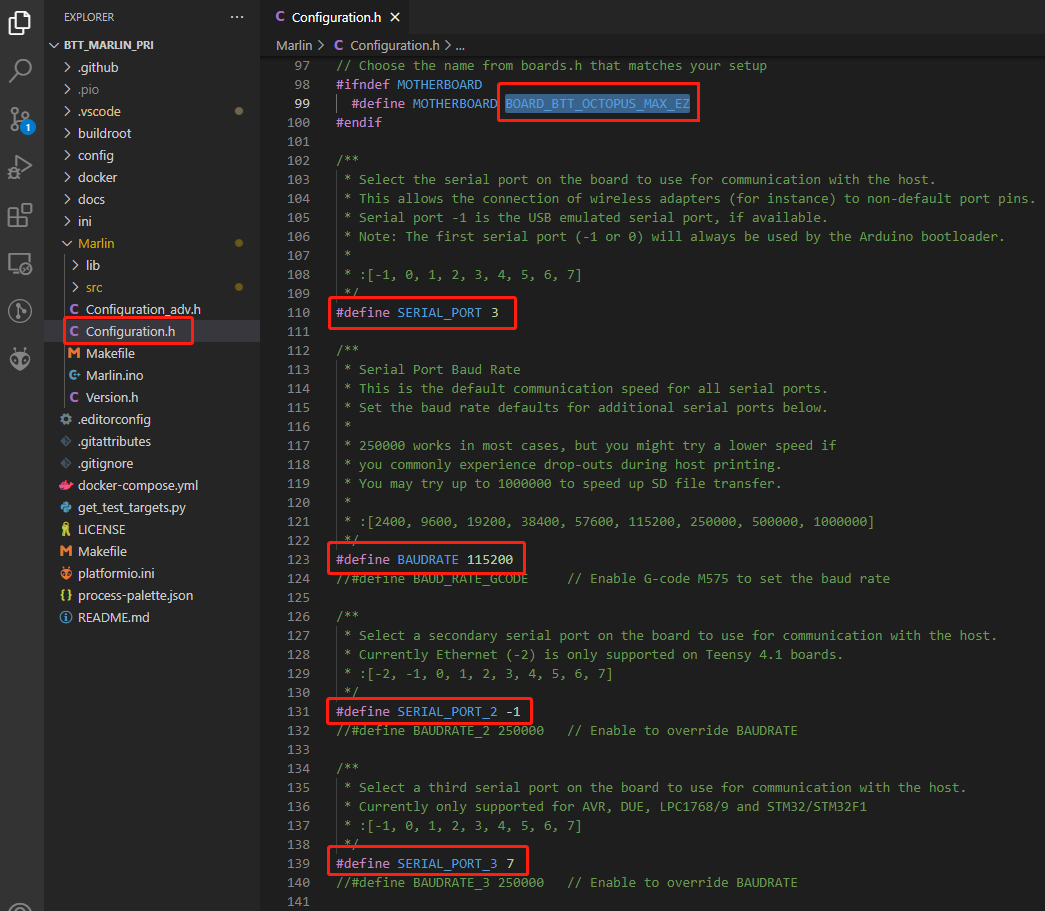
设置主板类型MOTHERBOARD为BOARD_BTT_OCTOPUS_MAX_EZ
#define MOTHERBOARD BOARD_BTT_OCTOPUS_MAX_EZ
#define SERIAL_PORT 3 (启用TFT串口)
#define BAUDRATE 115200 (设置波特率,注意要跟通信的设备一致)
#define SERIAL_PORT_2 -1 (启用USB模拟串口)
#define SERIAL_PORT_3 7 (启用WIFI的串口)
以上的设置根据需求自行启用
配置电机驱动¶
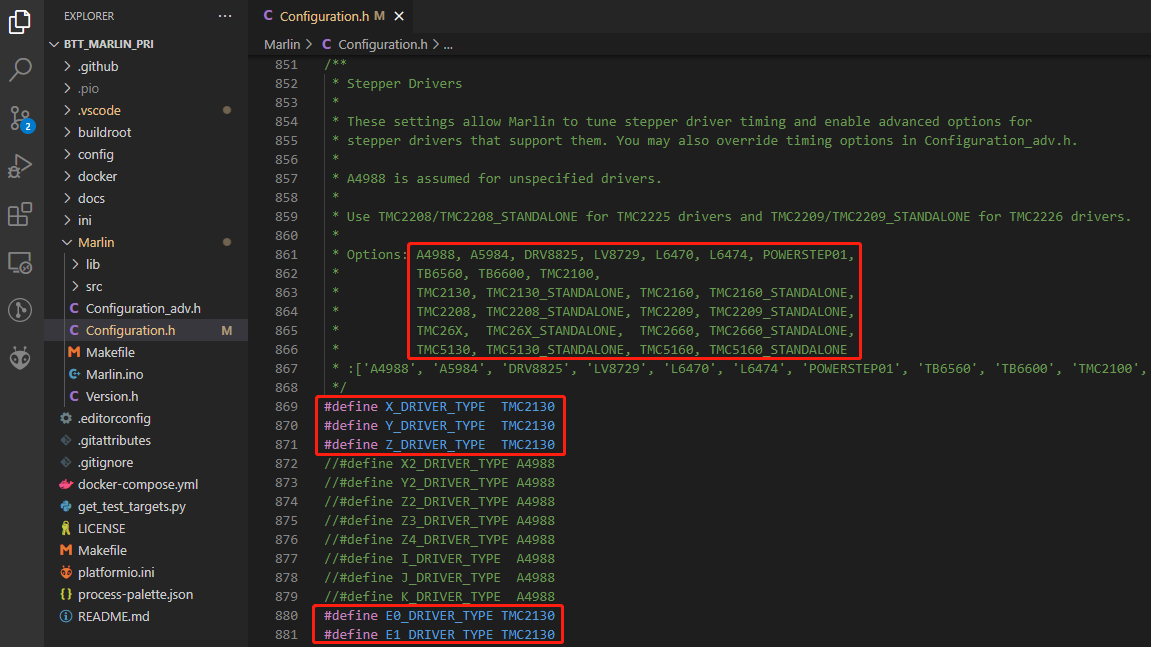
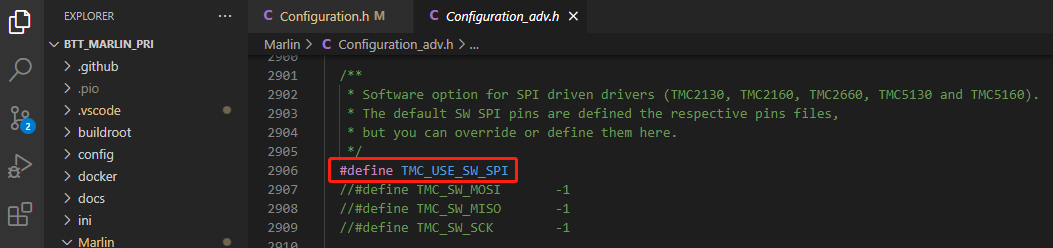
如果使用的驱动为SPI模式,还需在Configuration_adv.h文件中使能TMC_USE_SW_SPI
#define TMC_USE_SW_SPI
Sensorless Homing¶

#define SENSORLESS_HOMING //打开驱动堵转检测作为Home限位开关的功能
#define xx_STALL_SENSITIVITY 8 //设置堵转检测的灵敏度。TMC2209范围为0255,数值越大越灵敏,容易误触发,现象为Home的时候轴还没有回到原点就停下来了,数值越小越不灵敏容易不触发,现象为归零时一直撞轴发出“噔噔噔”的声音。其他驱动范围为63-64,数值越小越灵敏
defineIMPROVE_HOMING_RELIABILITY //可以在上面单独设置归零时的电流参数(X_CURRENT_HOME),以便得到最好的归零效果¶
#define IMPROVE_HOMING_RELIABILITY //可以在上面单独设置归零时的电流参数(xx_CURRENT_HOME),以便得到最好的归零效果
100KNTC或PT1000¶
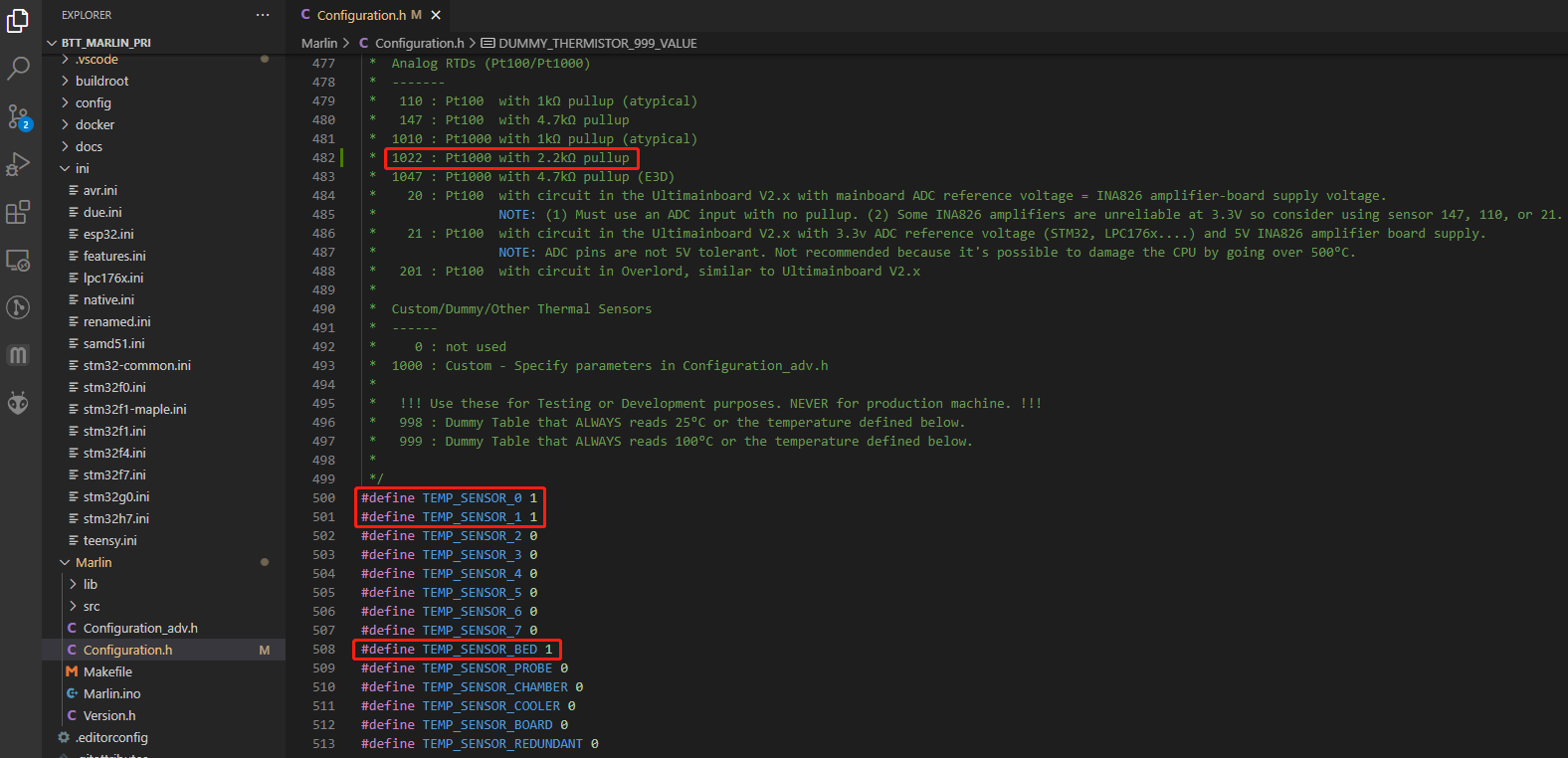
通过跳帽设置热敏电阻的上拉电阻为4.7K(搭配100KNTC)或是2.2K(搭配PT1000),Marlin固件中1代表100KNTC+4.7K上拉电阻,1022代表PT1000+2.2K上拉电阻 (注意:此种方式读出的温度精度会比MAX31865差很多)
#define TEMP_SENSOR_0 1
#define TEMP_SENSOR_1 1
#define TEMP_SENSOR_BED 1
BLTouch¶
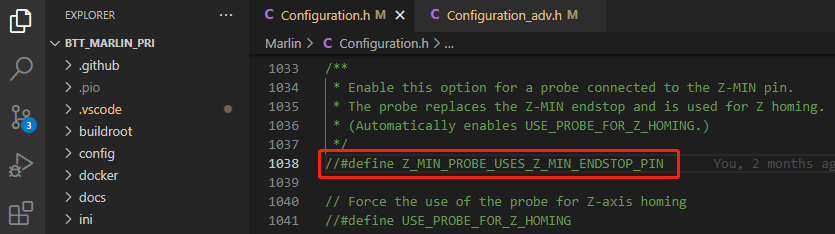
//#define Z_MIN_PROBE_USES_Z_MIN_ENDSTOP_PIN //不把Z_PROBE_PIN重映射到Z_MIN端口上

#define BLTOUCH // 使能BLtouch功能
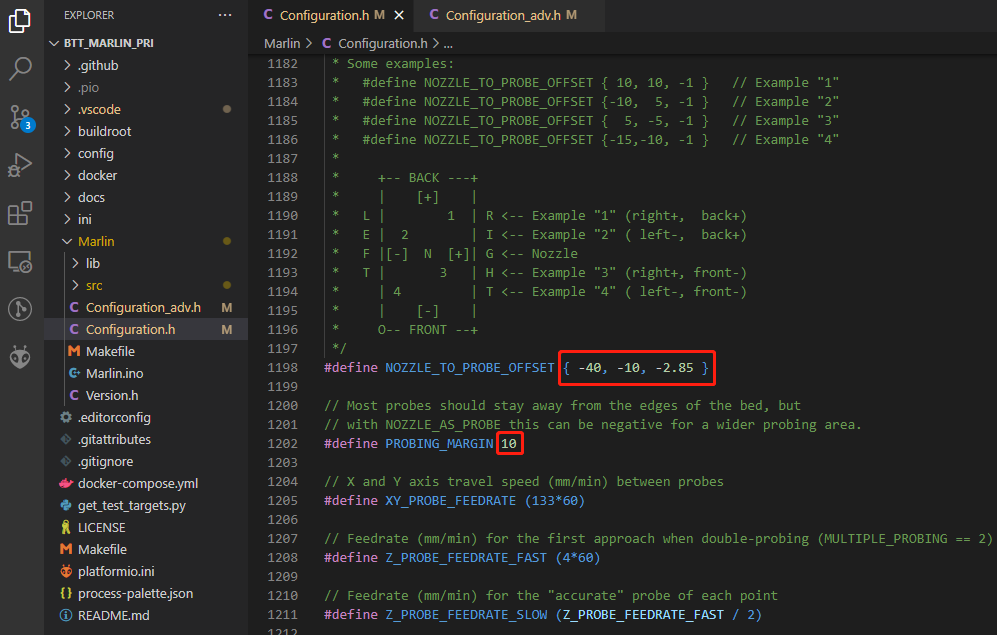
#define NOZZLE_TO_PROBE_OFFSET { -40, -10, -2.85 } // 设置BLTouch探针相对于喷嘴的偏移量
#define PROBING_MARGIN 10 // 设置调平探测点到最边缘的距离
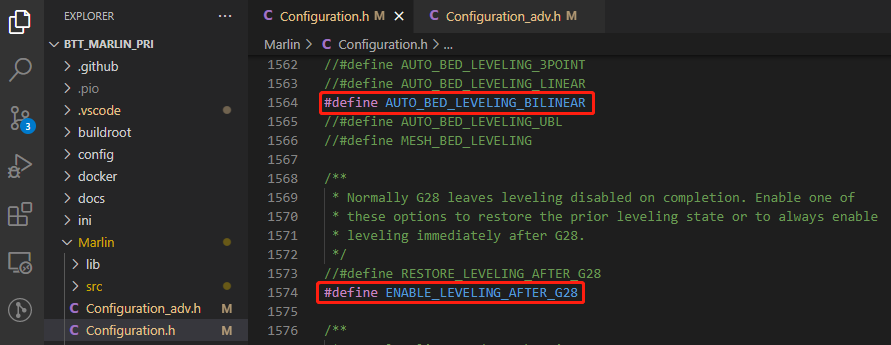
#define AUTO_BED_LEVELING_BILINEAR // 设置调平策略
#define RESTORE_LEVELING_AFTER_G28 // Home之后自动重新加载调平补偿
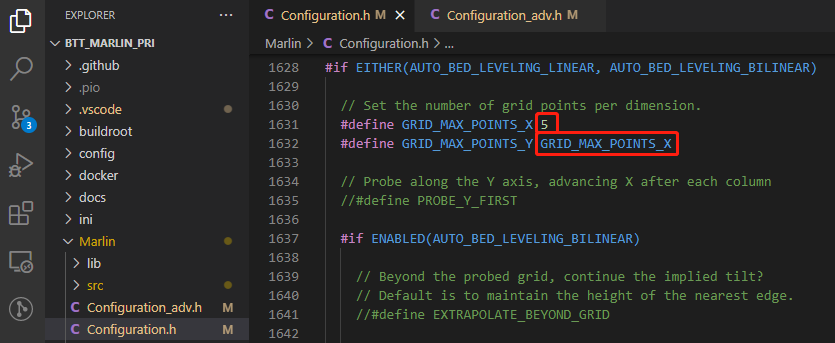
#define GRID_MAX_POINTS_X 5 // 设置调平探测的点数,X轴探测5个点
#define GRID_MAX_POINTS_Y GRID_MAX_POINTS_X // Y轴探测5个点
如果想用BLTouch作为Z轴限位开关,不需要更改接线,只需要修改固件的设置即可
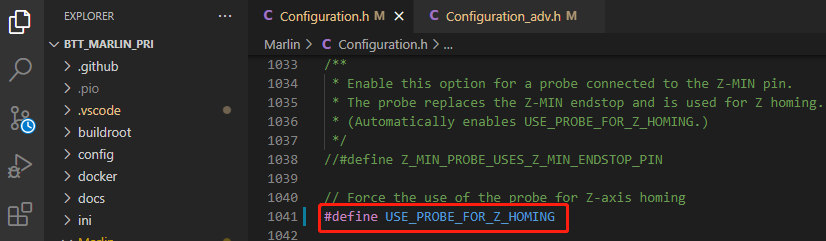
#define USE_PROBE_FOR_Z_HOMING //使用ZProbe(BLTouch)作为Z轴Home限位开关

#define Z_SAFE_HOMING // Z轴Home时,将X、Y移动到指定的坐标(通常是平台中心),保证Z轴Home时,ZProbe(BLtouch)的探针在平台的范围内
打完关机模块(RelayV1.2)¶
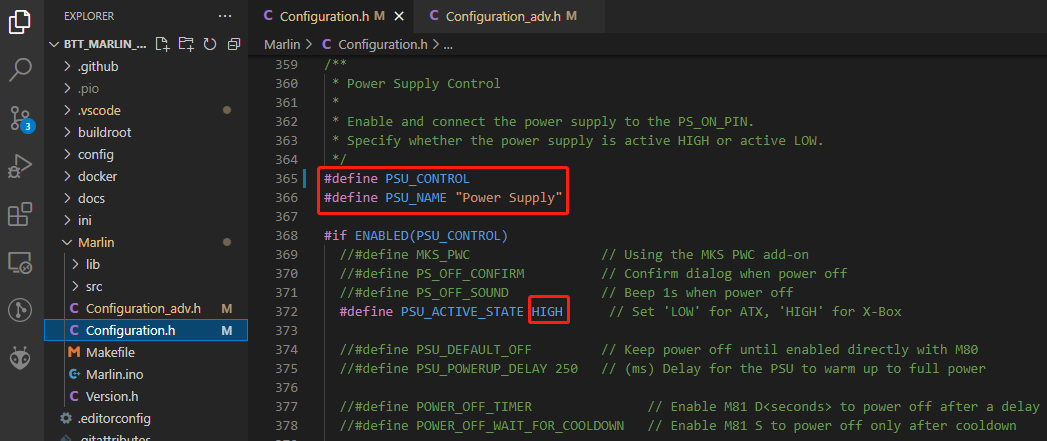
#define PSU_CONTROL // 打开控制电源功能,可以通过M80开机、M81关机
#define PSU_ACTIVE_STATE HIGH // 设置开机的电平,RelayV1.2模块是高电平开机低电平关机,所以需要设置为HIGH
断电续打¶
断电续打目前有两种实现方式
1、无需外接模块,固件定期向SD卡中保存打印状态,断电重启后从SD卡中保存的点继续打印,这种方式的缺点就是会向SD卡中频繁的写入数据,非常影响SD卡的使用寿命 。

#define POWER_LOSS_RECOVERY // 使能断电续打功能
#define PLR_ENABLED_DEFAULT true // true默认使用开启断电续打
2、外接UPS24VV1.0模块,断电时给主板提供电源并给主板发送信号,提醒主板保存打印状态,这方式只会在断电时向SD卡写入数据,对SD卡的使用寿命几乎没有影响。
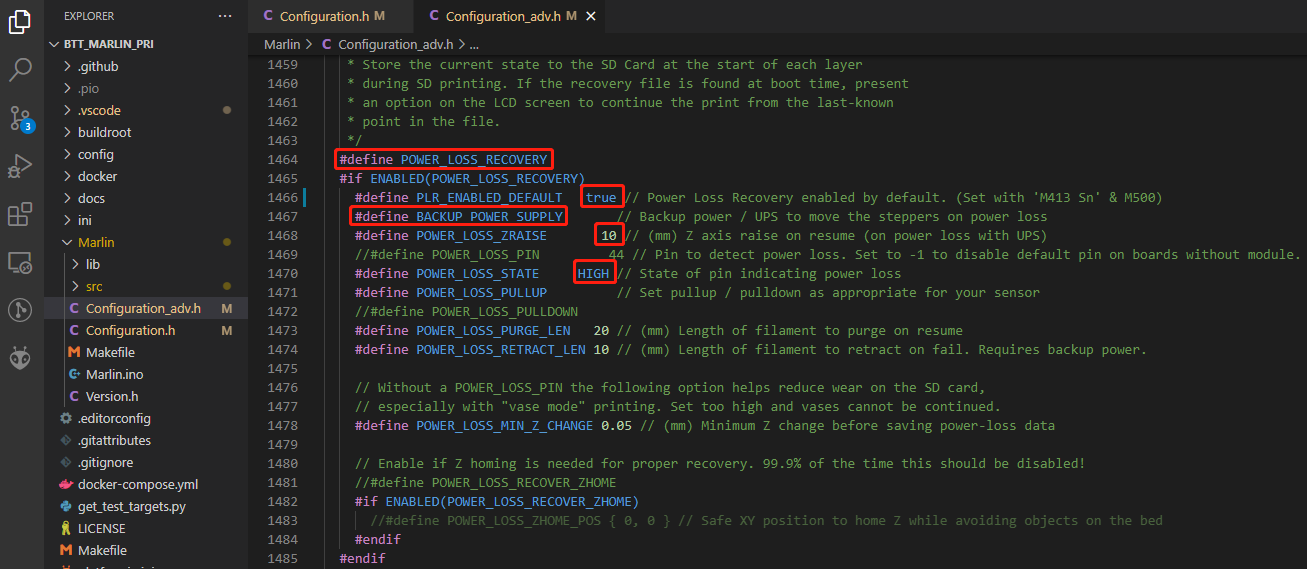
#define POWER_LOSS_RECOVERY // 使能断电续打功能
#define PLR_ENABLED_DEFAULT true // true默认使用开启断电续打
#define POWER_LOSS_ZRAISE 10 // 断电时喷头抬升10mm避免喷头烫坏模型
#define POWER_LOSS_STATE HIGH // 断电时模块反馈的电平,UPS24VV1.0正常工作时反馈低电平,断电时反馈高电平,所以设置为HIGH
RGB¶

#define NEOPIXEL_LED // 使能Neopixel功能
#define NEOPIXEL_TYPE NEO_GRB // 设置彩灯的类型
//#define NEOPIXEL_PIN 4 // 屏蔽PIN设置,使用主板pin文件中正确的信号线
#define NEOPIXEL_PIXELS 30 // 彩灯的数量
#define NEOPIXEL_STARTUP_TEST // 开机时会依次显示红绿蓝三种颜色便于测试
如果启用了LCD2004、12864、mini12864之类的显示器,还可以在界面上启用RGB的控制菜单。

#define LED_CONTROL_MENU // 在屏幕上添加控制LED颜色的菜单
断料检测¶
普通的断料检测模块一般是由机械开关设计而成的,模块给主板一个恒定的高低电平代表耗材的状态

#define FILAMENT_RUNOUT_SENSOR //使能耗材检测的功能
#define FIL_RUNOUT_ENABLED_DEFAULT true // true默认是打开的状态
#define NUM_RUNOUT_SENSORS 1 // 耗材检测传感器的数量
#define FIL_RUNOUT_STATE LOW // 耗材异常时的电平状态,根据模块实际情况设置,如果耗材异常时模块发出低电平就设置为LOW。
智能耗材检测(SFSV1.0)¶
智能耗材检测模块在耗材正常通过时会不断的发出跳变的电平信号,当堵料/断料等异常情况出现,耗材无法正常的通过SFS,模块就无法发出跳变的信号给主板,主板从而得知耗材异常。
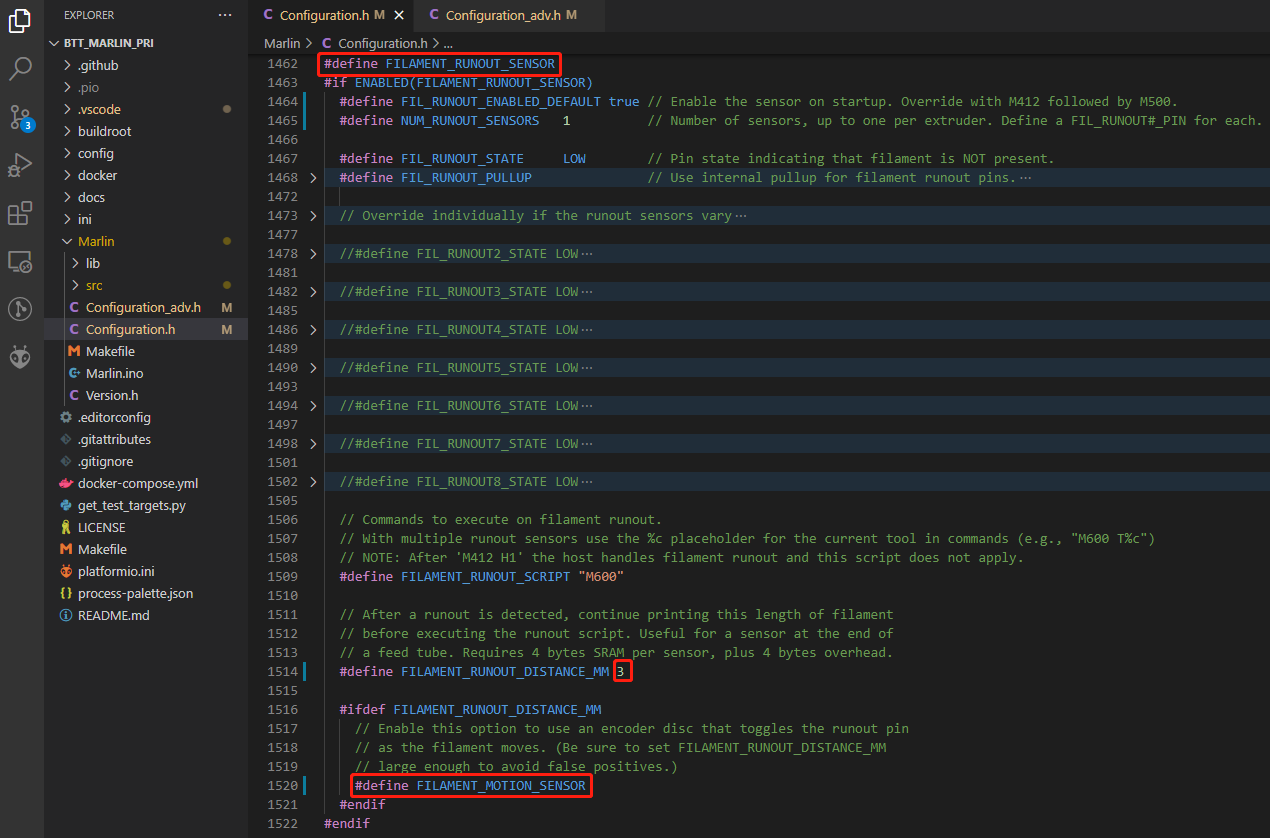
#define FILAMENT_MOTION_SENSOR // 设置耗材传感器为编码器类型
#define FILAMENT_RUNOUT_DISTANCE_MM 7 // 设置检测灵敏度,SFSV1.0推荐设置为7mm,耗材7mm内如果没有电平跳变就意味着耗材异常
耗材检测还需要通过以下两个地方来设置耗材异常暂停后的动作。

#define NOZZLE_PARK_FEATURE // 喷头暂停功能
#define NOZZLE_PARK_POINT { (X_MIN_POS + 10), (Y_MAX_POS - 10), 20 } // 设置喷头暂停时的X、Y的坐标以及Z轴抬升的高度
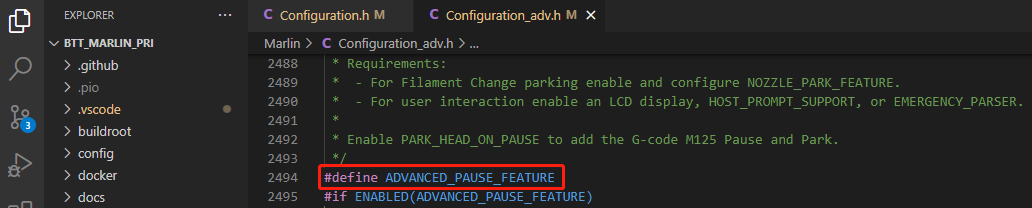
#define ADVANCED_PAUSE_FEATURE // 可以设置暂停时耗材回抽的长度及速度,继续打印后耗材挤出的长度和速度等参数
ESP3D¶
Marlin中只需设置正确的“SERIAL_PORT”和“BAUDRATE”即可。主板上ESP8266与Marlin通信的串口是UART3,所以将SERIAL_PORT设置为3。
可以在https://github.com/luc-github/ESP3D中获取最新的ESP3D固件,编译出您自己的二进制文件,将其重命名为“esp3d.bin”然后复制到SD卡的根目录中,插到主板上然后Reset,主板中的引导程序会自动将esp3d.bin更新到ESP8266中,更新完成后文件会被重命名为“ESP3D.CUR”
编译固件¶
1、点击底部状态栏中的“√”编译固件。
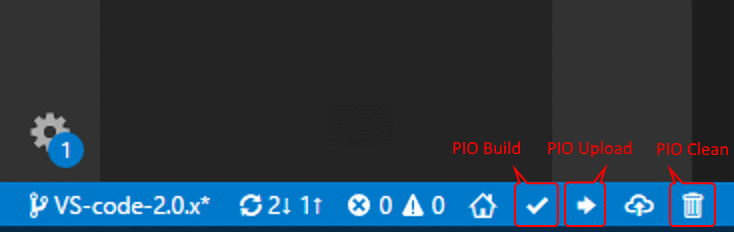
2、编译完成后会生成“firmware.bin”文件,复制到SD卡中即可更新固件。

Klipper¶
准备工作¶
下载系统镜像¶
下载内置你喜欢的WebUI的系统镜像,目前主流的有Fluidd、Mainsail等
内置Fluidd的系统: https://github.com/fluidd-core/FluiddPI/releases
内置Mainsail的系统: https://github.com/mainsail-crew/MainsailOS/releases

或者参考Klipper官方的安装说明使用Octoprint
下载并安装RaspberryPiImager¶
下载并安装树莓派官方的烧录软件 https://www.raspberrypi.com/software/
烧录镜像¶
1、将microSD卡通过读卡器插入到电脑。
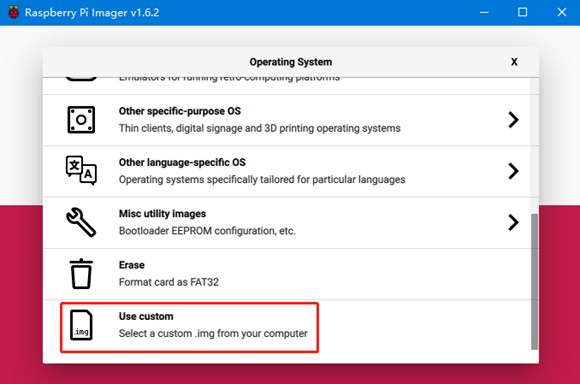
2、选择系统。

3、选择“用户自定义”,然后选择下载到电脑中的镜像。
4、选择待烧录的microSD卡(烧录镜像会将microSD卡格式化,千万注意不要选错盘符,否则会将其他存储上的数据格式化),点击“烧录”。

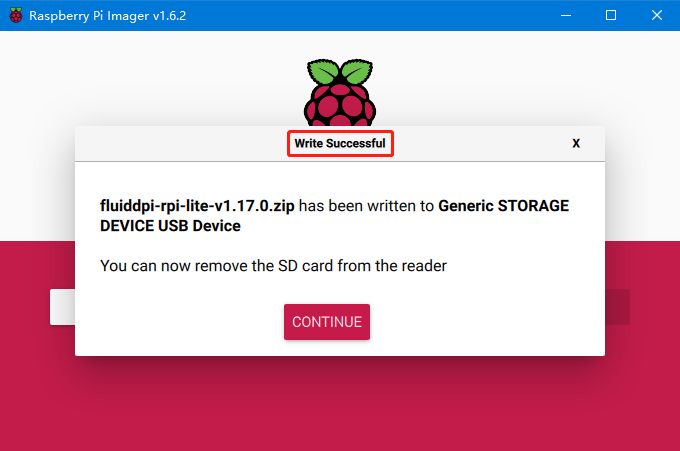
5、等待烧录完成。
设置WIFI¶
注意:如果使用网线端口而不是WIFI,可以跳过此步
1、重新拔插一下读卡器
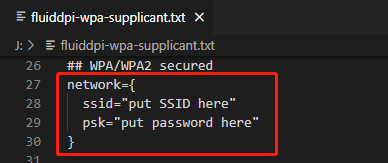
2、在SD卡的boot盘中找到“fluiddpi-wpa-supplicant.txt”或者“mainsail-wpa-supplicant.txt”文件,用VSCode打开(不要用windows自带的记事本打开)

3、删除红框中四行行首的‘#’字符,然后设置正确的WIFI名称和密码后保存。
SSH软件连接树莓派¶
1、安装ssh软件Mobaxterm: https://mobaxterm.mobatek.net/download-home-edition.html
2、将SD卡插到树莓派,通电后等待系统启动,大概1~2分钟。
3、树莓派连上WIFI或者插上网线后,会被自动分配一个IP。
4、进入路由器管理界面找到树莓派的IP。
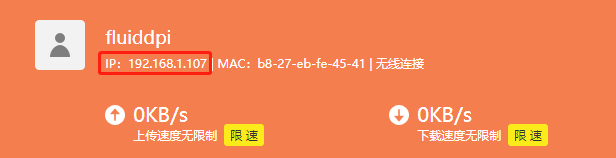
5、或者使用https://angryip.org/工具,扫描当前局域网下的所有IP地址,并使用主机名重新排序,找到主机名为Fluidd或者Mainsail的设备,如下图所示。

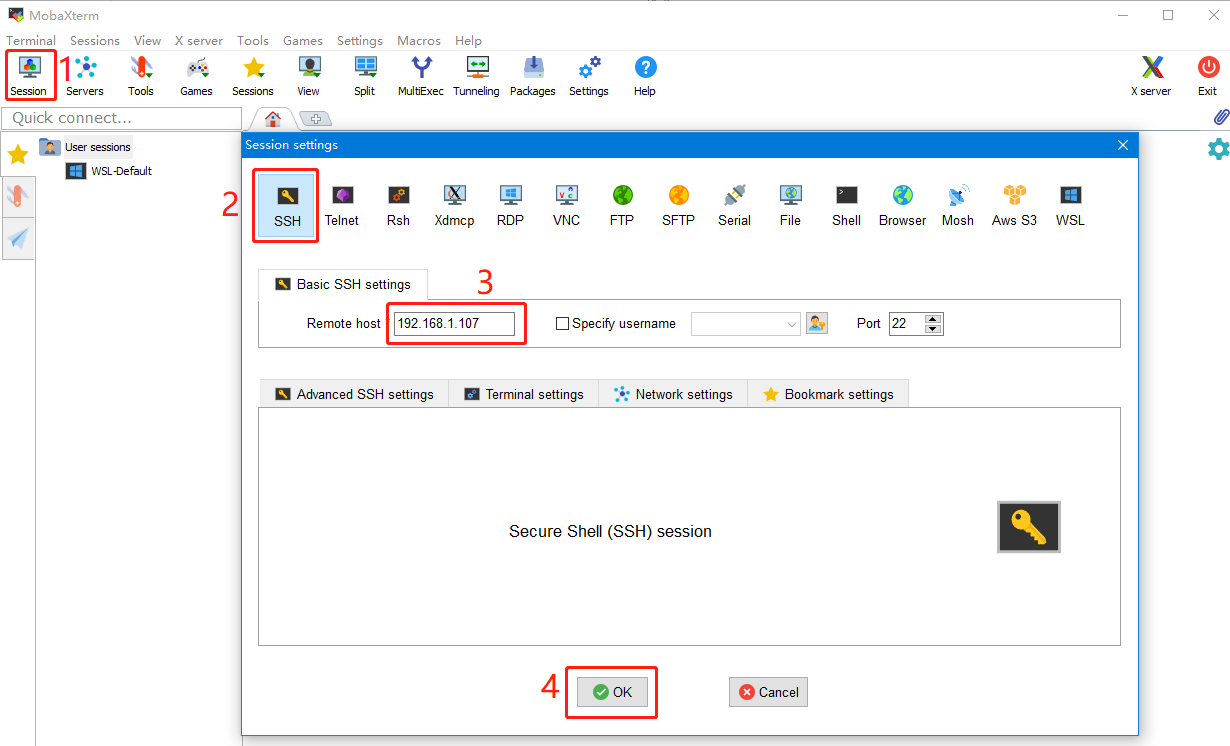
6、打开已经安装的Mobaxterm软件,点击“Session”,在弹出的窗口中点击“SSH”,在Remotehost一栏中输入树莓派的IP地址,点击“OK”(注意:电脑和树莓派必须要在同一个局域网下)。
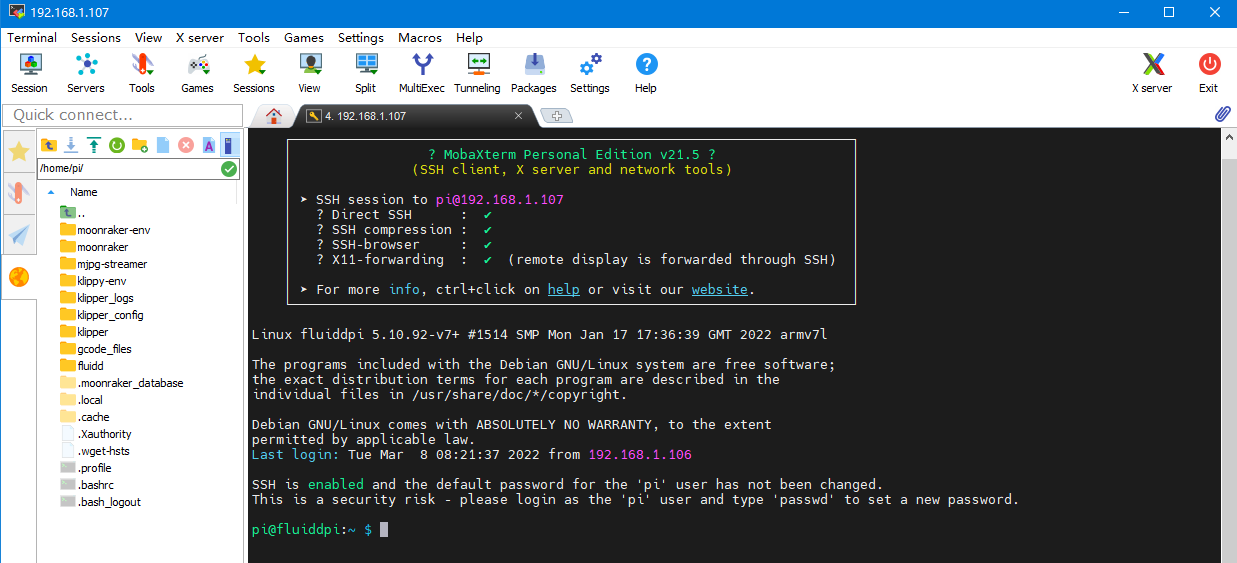
7、输入登录名loginas:pi登录密码:raspberry进入SSH终端界面
编译固件¶
1、ssh连接到树莓派后,在命令行输入: cd ~/klipper/ make menuconfig 使用下面的配置编译固件(如果没有下列选项,请更新Klipper固件源码到最新版本)。 [*] Enable extra low-level configuration options * Micro-controller Architecture (STMicroelectronics STM32) ---> * Processor model (STM32H723) ---> * Bootloader offset (128KiB bootloader (SKR SE BX v2.0)) ---> * Clock Reference (25 MHz crystal) ---> ** Communication interface (USB (on PA11/PA12)) --->
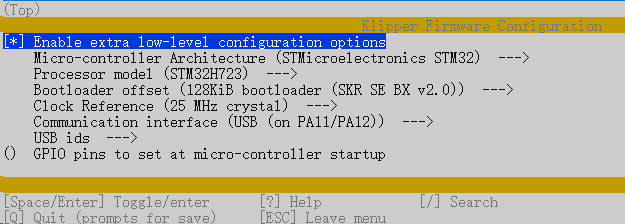
2、配置选择完成后,输入q退出配置界面,当询问是否保存配置是选择"Yes"
3、输入make编译固件,当make执行完成后会在树莓派的home/pi/klipper/out文件夹中生成我们所需要的klipper.bin固件,在ssh软件左侧可以直接下载到电脑中。

4、将klipper.bin重命名为“firmware.bin”,复制到SD卡中即可更新固件。
5、在命令行输入:ls/dev/serial/by-id/查询主板的ID来确认固件是否烧录成功,如果烧录成功了会返回一个klipper的设备ID,如下图所示。

复制保存此ID,配置文件中需要设置此ID。
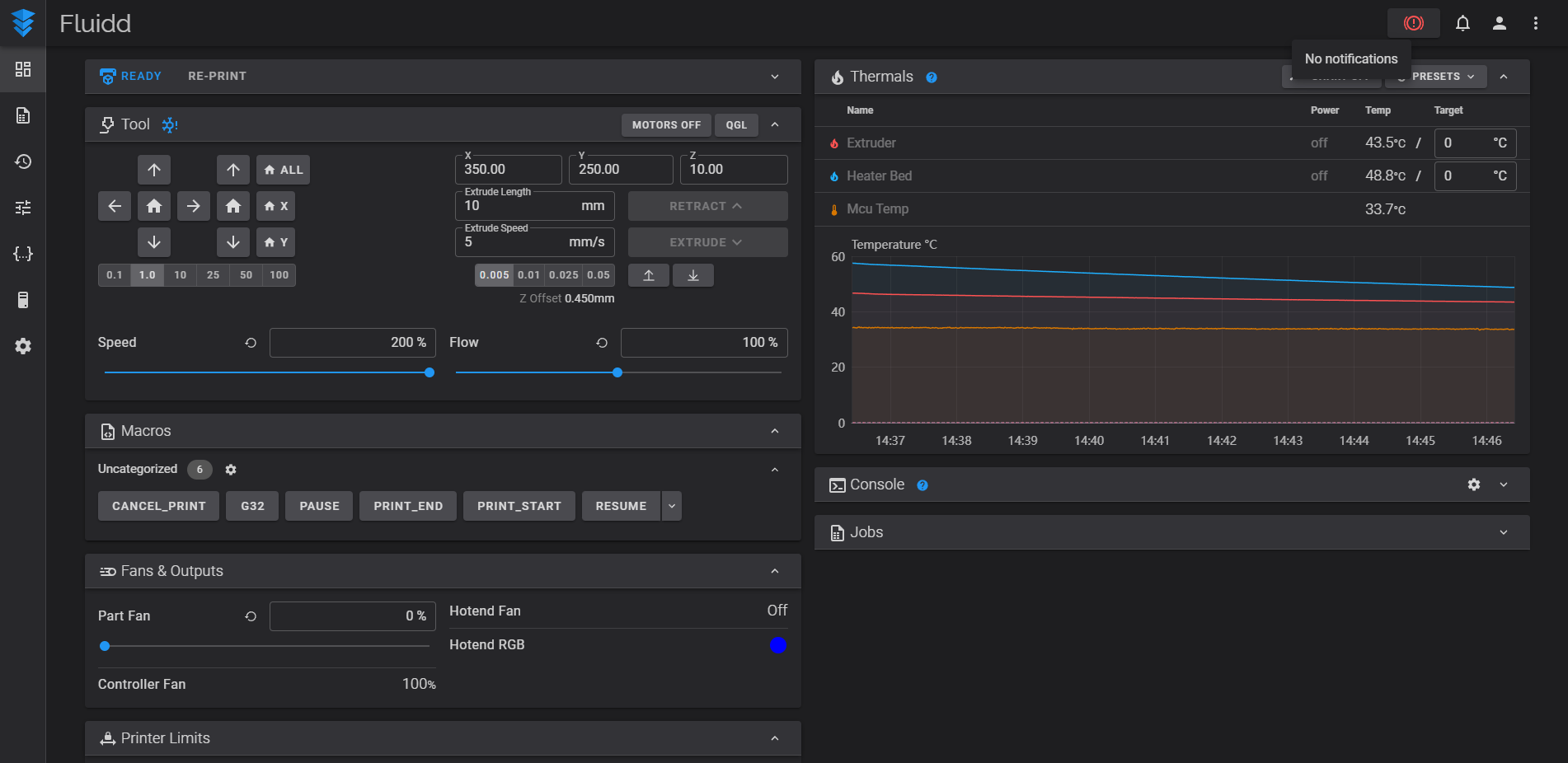
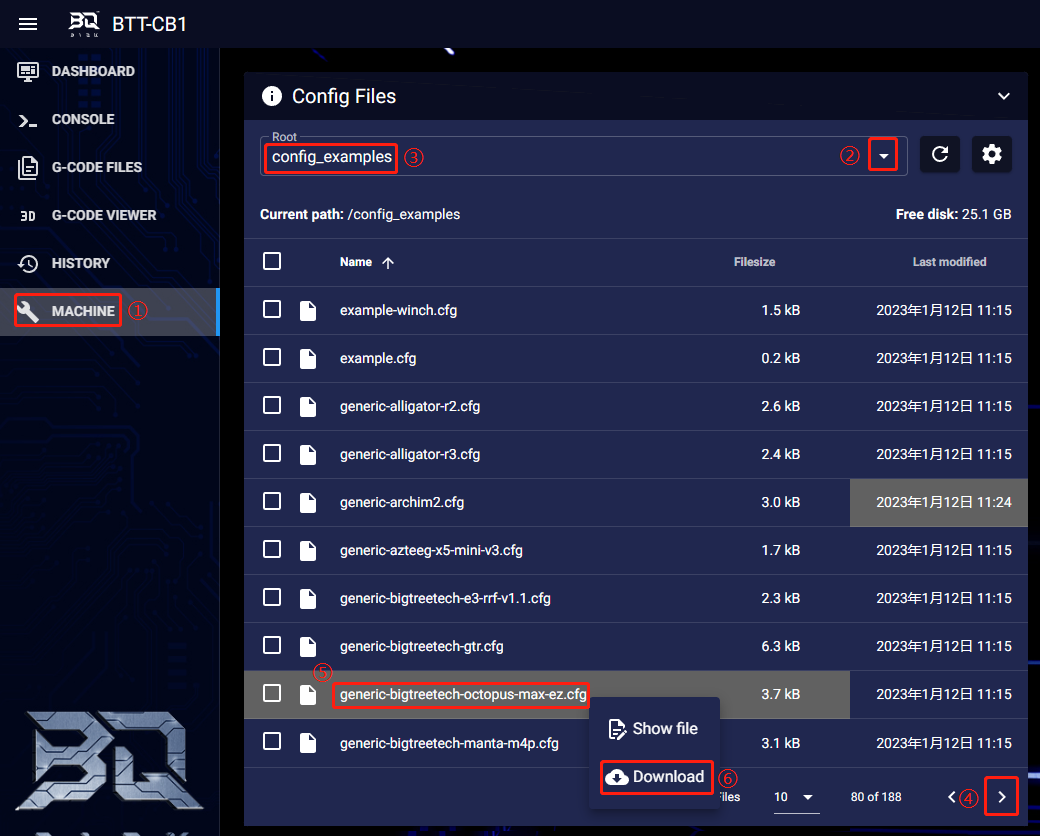
配置Klipper¶
1、在电脑的浏览器中输入树莓派的IP访问,如下图所示的路径中下载主板的参考配置,如果找不到此文件,请更新Klipepr固件源码到最新版本,或者到github下载:https://github.com/bigtreetech/BIGTREETECH-OCTOPUS-Max-EZ
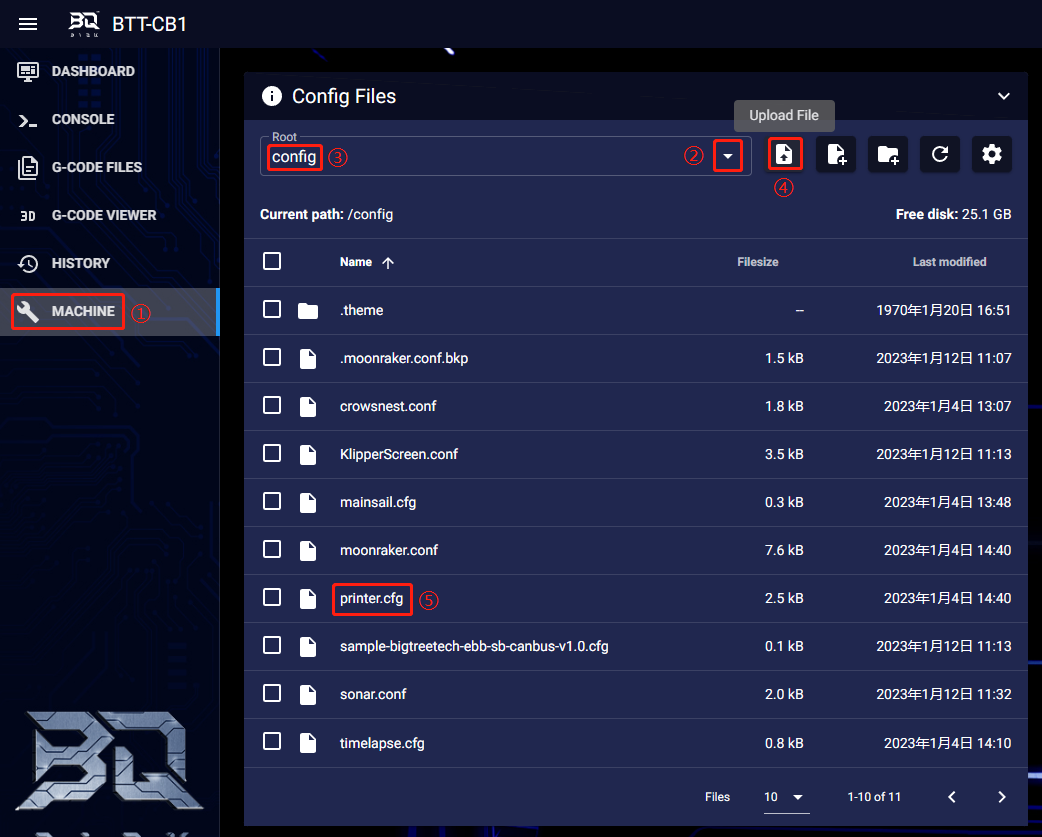
2、将主板的配置文件上传到ConfigurationFiles中,并重命名为 "printer.cfg".
3、将配置文件中的ID号修改为主板实际的ID

4、按照https://www.klipper3d.org/Overview.html的说明配置机器的具体功能。
固件更新¶
MicroSD卡更新¶
- 确保MicroSD卡已经被格式化为FAT32文件系统。
- 将自行编译或从github下载的固件重命名为“firmware.bin”(注意:明确电脑系统的扩展名设置,有部分用户隐藏了扩展名,“firmware.bin”实际显示的是 “firmware”)
- 将“firmware.bin”复制到microSD卡的根目录中。
- 将microSD卡插入主板的卡槽中,给主板重新通电,主板的引导程序会自动更新固件。
- 固件更新的过程中,主板右上角的状态指示灯会开始闪烁。
- 当状态指示灯停止闪烁并且microSD卡中的文件名被重命名为“FIRMWARE.CUR”代表固件更新成功。
DFU更新Klipper¶
- 在命令行输入:ls/dev/serial/by-id/查询主板的ID,如果主板正常运行了Klipper则会返回一个klipper的设备ID,如下图所示

- 如果ls/dev/serial/by-id/能够找到MCU的klipper设备ID,可以直接输入 cd~klipper makeflashFLASH_DEVICE=/dev/serial/by-id/usb-Klipper_stm32h712xx_41003D001751303232383230-if00 烧录固件(注意:将/dev/serial/by-id/xxx更换为上一步中查询到的实际的ID)

烧录完成后会有dfu-util:Errorduringdownloadget_status错误信息,忽略即可
注意事项¶
-
所有的拔插操作请在断电的情况下进行。
-
使用风扇时,注意电压选择必须与风扇工作电压一致,防止损坏风扇。
如果您还需要此产品的其他资源,可以到https://github.com/bigtreetech/上自行查找, 如果无法找到您所需的资源,可以联系我们的售后支持(service005@biqu3d.com)。
若您使用中还遇到别的问题,欢迎您联系我们,我们定会细心为您解答;若您对我们的产品有什么好的意见或建议,也欢迎您回馈给我们,我们也会仔细斟酌您的意见或建议,感谢您选择BIGTREETECH制品,谢谢!