EBB SB2209 CAN RP2040¶
/EBB_SB2240_2209(RP2040)_title.png)
有关EBB SB2209 CAN V1.0(RP2040)结构的信息,请点击 :
EBB SB2209 CAN V1.0 (RP2040).PDF
产品简介¶
红色突出显示的是Voron StealthBurner的其他配件,这些配件不包括在本EBB SB2209 CAN V1.0(RP2040)中,需要自行购买。
功能亮点¶
-
此EBB SB2209 CAN V1.0(RP2040)中包含以蓝色突出显示的部分。
-
红色突出显示的是Voron StealthBurner的其他配件,这些配件不包括在本EBB SB2209 CAN V1.0(RP2040)中,需要自行购买。
软件配置¶
烧录KATAPULT¶
之前被称为「CanBoot」的引导加载程序软件已更名为「Katapult」。
注意:Katapult 旨在通过 CAN bus 接口直接更新 MCU 固件。 若您更倾向于使用 DFU 更新方法,请跳过此步骤。
“树莓派或CB1烧录Katapult”
参考此处说明下载Katapult工程
https://github.com/Arksine/Katapult
1.输入:
跳转到主目录,输入,
下载Katapult工程,
输入:
跳转到Katapult目录中。
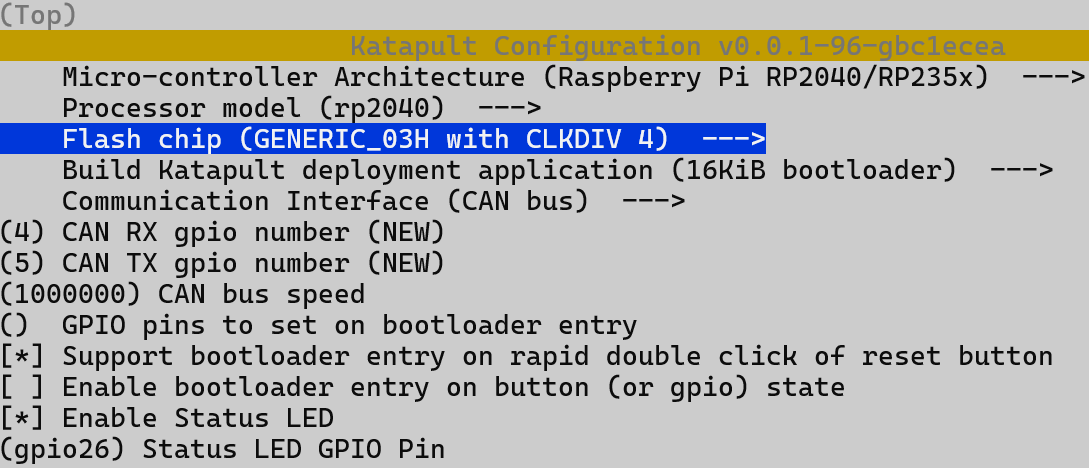
2.输入:
并按照下图配置
3.输入make编译固件,当make执行完成后会在 home/biqu/Katapult/out 文件夹中生成我们所需要的‘canboot.uf2’固件,在SSH软件左侧可以直接下载到电脑中。
/EBB_SB2240_2209(RP2040)_software18.png)
4.1 请使用Type-C连接线将 EBB SB2209 CAN V1.0(RP2040) 连接至树莓派/CB1,并确保已连接USB_5V跳线帽,以便通过Type-C为EBB SB2209 CAN V1.0 (RP2040) 提供电源。
/EBB_SB2240_2209(RP2040)_software3.png)
4.2. 按住Boot按钮,然后单击一下Reset按钮进入DFU模式.
/EBB_SB2240_2209(RP2040)_software4.png)
4.3. 在SSH终端命令行中输入
查询 DFU设备ID
/EBB_SB2240_2209(RP2040)_software5.png)
4.4. 请输入以下命令以烧录Katapult:
其中“2e8a:0003”需替换为第4.3步中查询到的实际设备ID。
4.5. 烧录完成后,请拔下 USB_5V 跳线帽和Type-C数据线。
编译固件¶
1.)SSH连接到树莓派后,在命令行输入
使用下面的配置编译固件(如果没有下列选项,请更新Klipper固件源码到最新版本。
[*] Enable extra low-level configuration options
Micro-controller Architecture (Raspberry Pi RP2040/RP235x) --->
如果不使用Katapult
Bootloader offset (No bootloader) --->
Flash chip (GENERIC_03H with CLKDIV 4) --->
如果使用Katapult
Bootloader offset (16KiB bootloader) --->
如果使用Type-C上的USB通信
Communication interface (USB) --->
如果使用CANBus通信
Communication interface (CAN bus) --->
(4) CAN RX gpio number
(5) CAN TX gpio number
(1000000) CAN bus speed
2.) 配置选择完成后, 输入 ‘q’退出配置界面,当询问是否保存配置时选择 “Yes”.
3.) 输入make编译固件,当make执行完成后会在home/pi/klipper/out文件夹中生成我们所需要的‘klipper.bin’固件,在SSH软件左侧可以直接下载到电脑中.
/EBB_SB2240_2209(RP2040)_software6.png)
通过Katapult进行固件更新¶
1.使用CAN bus需要接好CAN bus线缆以及插上120R终端电阻的跳线帽。
2.输入:
然后输入:
查询canbus ID (需提前接好CAN线并通电),如下图已找到设备的UUID。
/EBB_SB2240_2209(RP2040)_software7.png)
3.输入:
替换为实际的UUID,注意:klipper.bin需要提前make生成出来,并且CanBoot的Application start offset 为16KiB offset,所以Klipper的menuconfig中Bootloader offset 也要为16KiB bootloader,如下图已经烧录成功.
/EBB_SB2240_2209(RP2040)_software8.png)
4.输入:
查询,此时Application由之前的Katapult变为Klipper,代表Klipper已经正常运行。
/EBB_SB2240_2209(RP2040)_software9.png)
通过DFU进行固件更新¶
树莓派或CB1通过DFU更新
1.请使用Type-C连接线将EBB SB2209 CAN V1.0 (RP2040)连接至树莓派/CB1,并确保已连接USB_5V跳线帽,以便通过Type-C为EBB SB2209 CAN V1.0 (RP2040)提供电源。
/EBB_SB2240_2209(RP2040)_software10.png)
2.按住Boot按钮,然后单击一下Reset按钮进入DFU模式。
/EBB_SB2240_2209(RP2040)_software11.png)
3.在SSH终端命令行中输入
查询 DFU设备ID
/EBB_SB2240_2209(RP2040)_software12.png)
4.输入:
跳转到klipper目录下,输入
开始烧录固件
注意:将2e8a:0003更换为上一步中查询到的实际的设备ID
5.固件烧录完成后,输入
查询设备的Serial ID(只有通过USB通信的方式才会有此ID,CANBus方式忽略此步骤)。
6.如果使用USB通信,第一次烧录完成之后,再次更新时无需手动按Boot和Reset按钮进入DFU 模式,可以直接输入
烧录固件(注意:将/dev/serial/by-id/xxx更换为上一步中查询到的实际的ID)。
烧录完成后,请拔下 USB_5V 跳线帽和Type-C数据线。
CAN BUS配置¶
搭配BIGTREETECH U2C 模块使用
/EBB_SB2240_2209(RP2040)_software13.png)
1.在SSH终端中输入
命令并执行
将 CAN bus 速度设置为 1M(必须与固件中设置的速度一致(1000000) CAN bus speed),修改后保存(Ctrl + S)并退出(Ctrl + X),输入
重启树莓派
2.CANBus上的每个设备都会根据MCU的UID生成一个 canbus_uuid,要查找每个微控制器设备 ID,请确保硬件已通电并正确接线,然后运行:
3.如果检测到未初始化的 CAN 设备,上述命令将报告设备的canbus_uuid:
4.如果 Klipper 已经正常运行并且连接到此设备,那么canbus_uuid将不会被上报,此为正常现象。
配置KLIPPER¶
1.在电脑的浏览器中输入树莓派的IP访问,如下图所示的路径中下载主板的参考配置,如果找不到此文件,请更新Klipepr固件源码到最新版本,或者到GitHub下载:
https://github.com/bigtreetech/EBB
/EBB_SB2240_2209(RP2040)_software14.png)
2.将主板的配置文件上传到Configuration Files中;
/EBB_SB2240_2209(RP2040)_software15.png)
3.并在“printer.cfg”文件中添加此主板的配置
/EBB_SB2240_2209(RP2040)_software16.png)
4.将配置文件中的ID号修改为主板实际的ID(USB serial 或者 canbus)
/EBB_SB2240_2209(RP2040)_software17.png)
5.按照下方链接的说明配置模块的具体功能:
https://www.klipper3d.org/Overview.html