Hermit Crab 2 Series¶
产品简介¶
HermitCrab2系列专为快速更换工具头而设计。该系列配备了一个固定板和多个工具板,使用户能够根据不同需求迅速切换不同的打印头。2系列更为轻便、更为紧凑,同时具备更强的稳固性。
功能亮点(Hermit Crab 2 CAN)¶
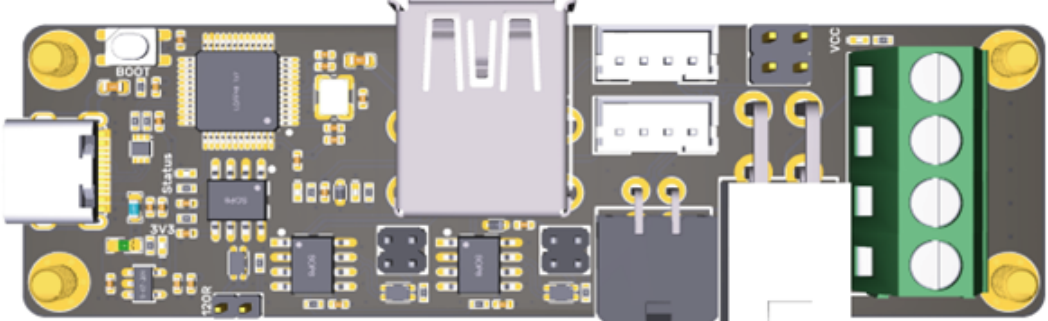
- 主板预留BOOT按键,用户可以通过USB进入DFU模式更新固件
- 热敏电阻部分增设保护电路,避免因加热棒漏电导致主控芯片烧毁
- 预留I2C、RGB等接口,可供客户DIY多种功能使用
- 数控风扇电压可选,增强对风扇类型的兼容性
- USB通电通过跳线帽选择,有效隔离主板DC-DC与USB5V
- 接近开关,2线风扇,4线风扇支持VIN/12V/5V电压选择
- 加热棒及风扇端口增加防反激二极管及保险丝,有效保护MOS管不被反向电压烧毁
- 艾迈斯电源接口,支持更大的电流输入,且增加防反接保护电路,避免出现客户接反电源线烧板的现象
- 支持2线PT100/PT1000/NTC100K选择
- 支持CAN或USB通讯,其中CAN的终端电阻120R可通过跳线帽选择,且预留CAN拓展接口
- USB口设ESD保护芯片,防止主控被USB口静电击穿
- 5V和12V增加E-FUSE保护芯片,大大降低因短路或者打火等故障导致芯片被烧毁的风险
- 增设精度更高的LIS2DW加速度计,方便客户更好的使用共振补偿功能
规格¶
| Hermit Crab 2 | Hermit Crab 2 CAN | |
|---|---|---|
| 固件支持 | Klipper, Marlin, RRF | Klipper |
| 板载加速度计 | - | LIS2DW |
| 板载Max31865 | - | √ |
| CAN接口 | - | XT30 |
| 微处理器 | - | RP2040 Dual ARM Cortex-M0+@133MHz |
| 材质 | 铝合金 | 铝合金 |
| 输入电压 | DC12V-24V | DC12V-24V |
| 逻辑电压 | - | DC 3.3V |
| 加热接口 | 加热棒(HE0),最大输出电流:3A | 加热棒(HE0),最大输出电流: 6A |
| 风扇接口 | 2x2线数控风扇(FAN1,FAN2),1x4线风扇(FAN0), 支持电压可选 | 2x2线数控风扇(FAN1,FAN2),1x4线风扇(FAN0), 支持电压可选 |
| 风扇接口最大输 出电流 |
0.75A,峰值0.9A | 0.75A,峰值0.9A |
| 拓展接口 | RGB, I2C, Probe | I2C,Probe,RGB,USB,CAN,STOP |
| 电机驱动 | - | TMC2209 |
| 驱动工作模式 | - | UART |
| 步进电机接口 | E0 | E0 |
| 温度传感器接口 | - | 1路NTC100K/PT100/PT1000可选 |
| USB通信接口 | - | USB Type-C |
| DCDC5V输出最大电流 | 1A | 1A |
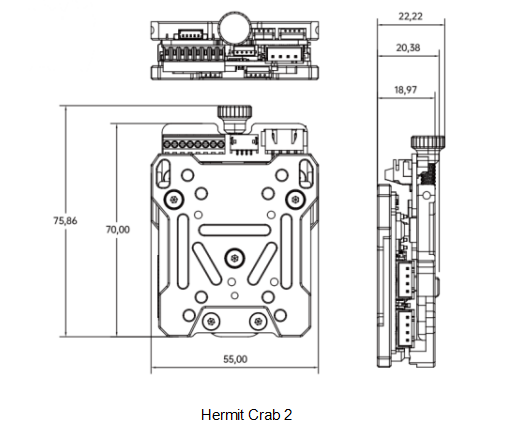
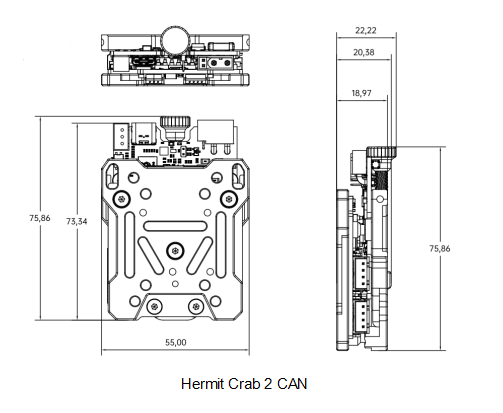
尺寸¶
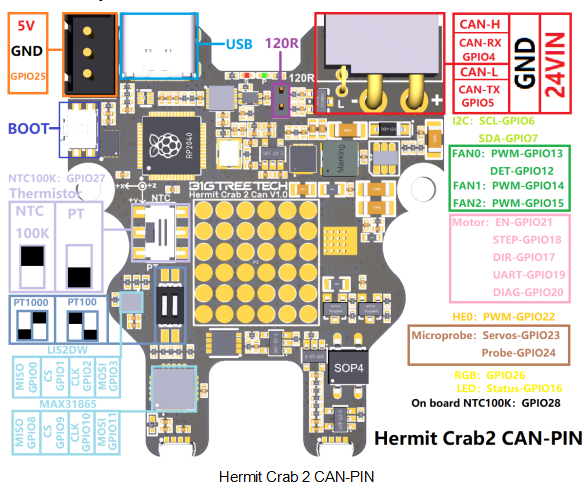
外设接口¶
Pin脚说明¶
接线¶
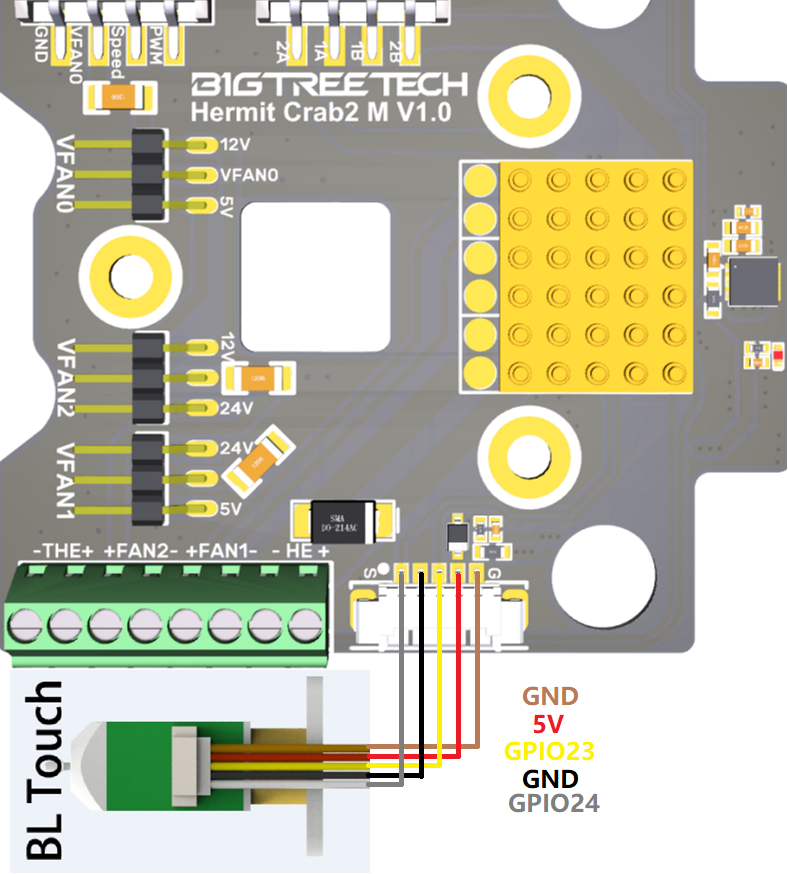
BLTouch 接线
风扇电压选择¶
四线风扇
Use jumper to select voltage for VFAN0 between 5V or 12V.

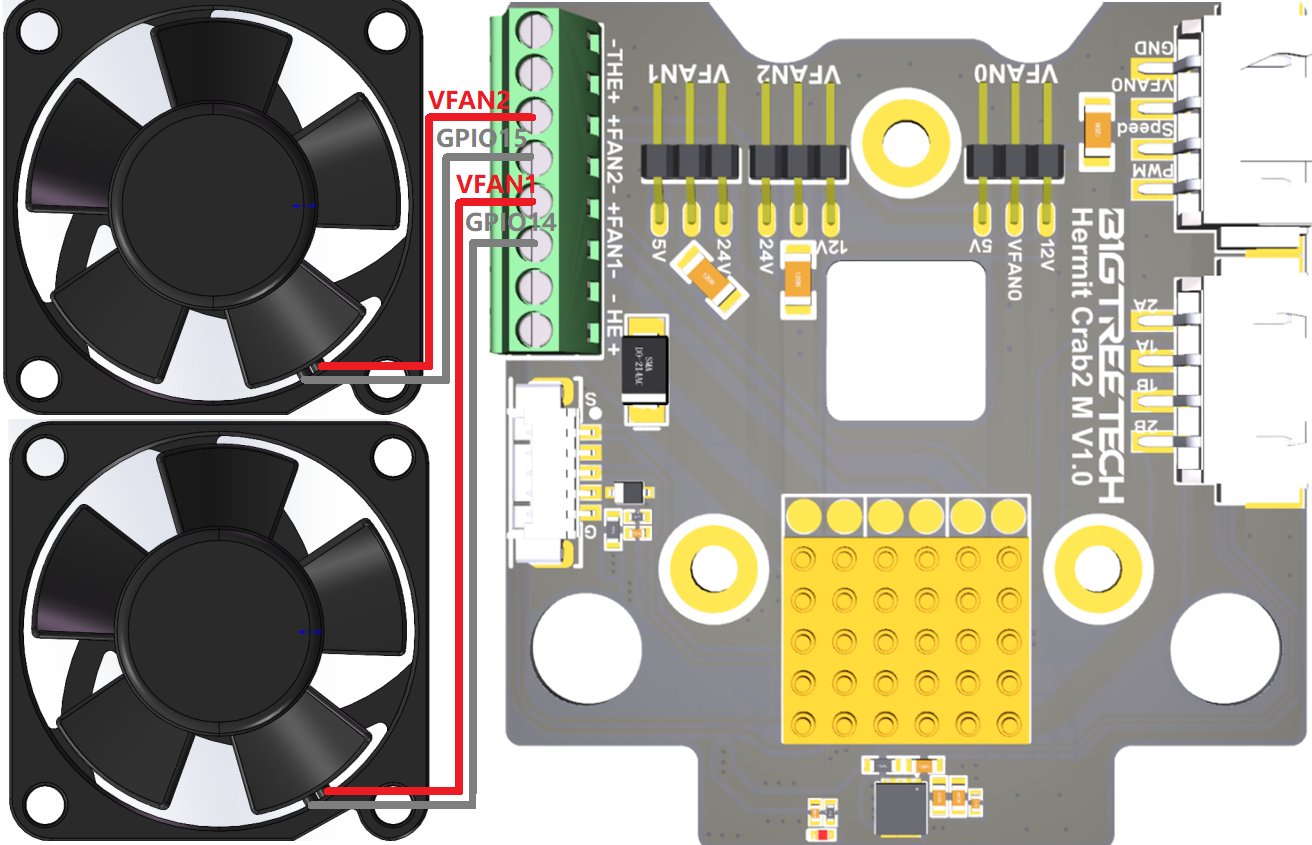
两线风扇
使用跳线帽短接排针,进行风扇电压选择:其中VFAN1支持5V或24V选择,VFAN2支持12V或24V选择。
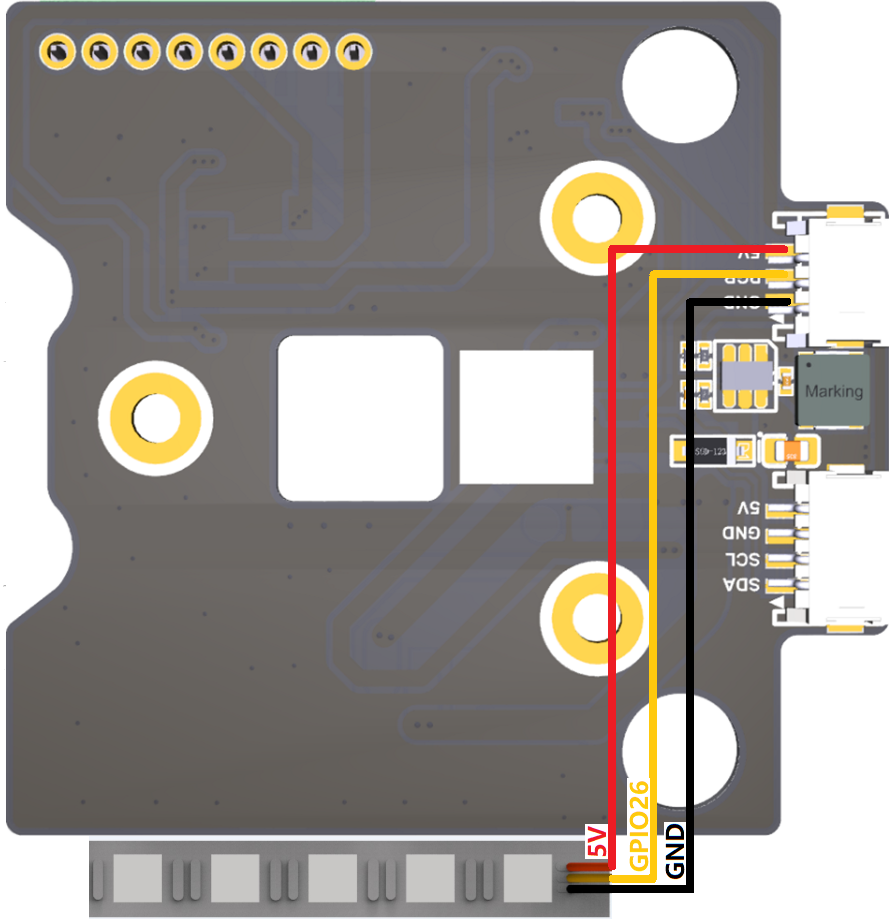
RGB 接线¶
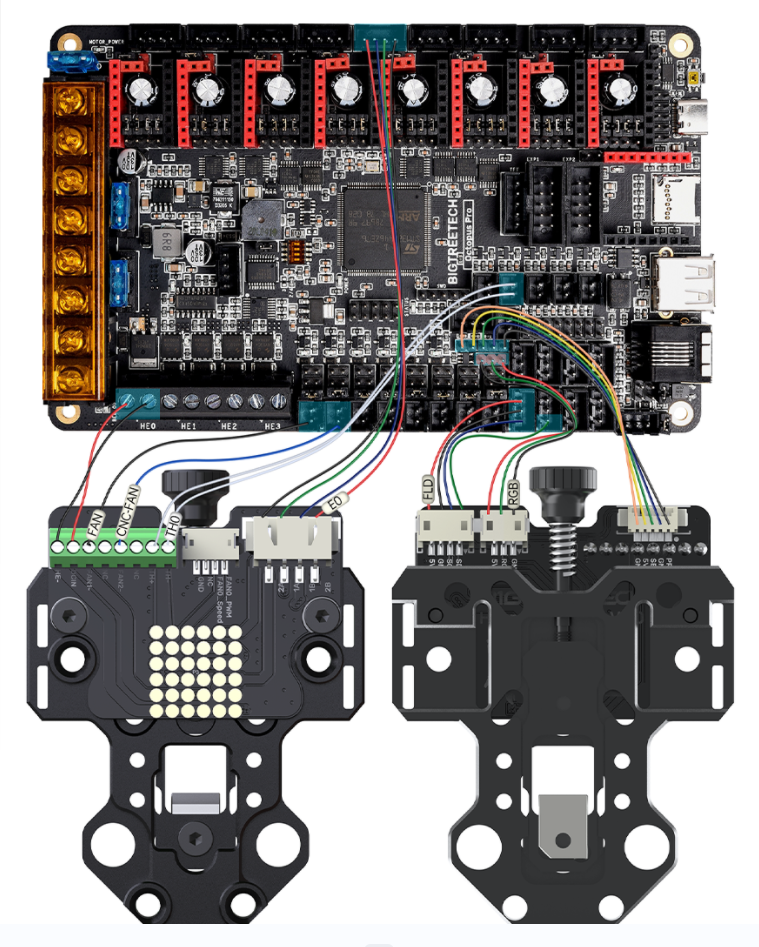
OctopusPro与HermitCrab2接线¶
固件设置(Hermit Crab 2 CAN)¶
烧录KATAPULT¶
注意:Katapult旨在通过CANbus接口直接更新MCU固件,若您更倾向于使用DFU更新方法,请跳过此步骤。
“树莓派或CB1烧录Katapult”,参考此处说明下载Katapult工程:
https://github.com/Arksine/Katapult
1、输入
cd ~
跳转到主目录,输入
git clone https://github.com/Arksine/Katapult
下载Katapult工程,然后输入
cd Katapult
跳转到Katapult目录中。
2、输入
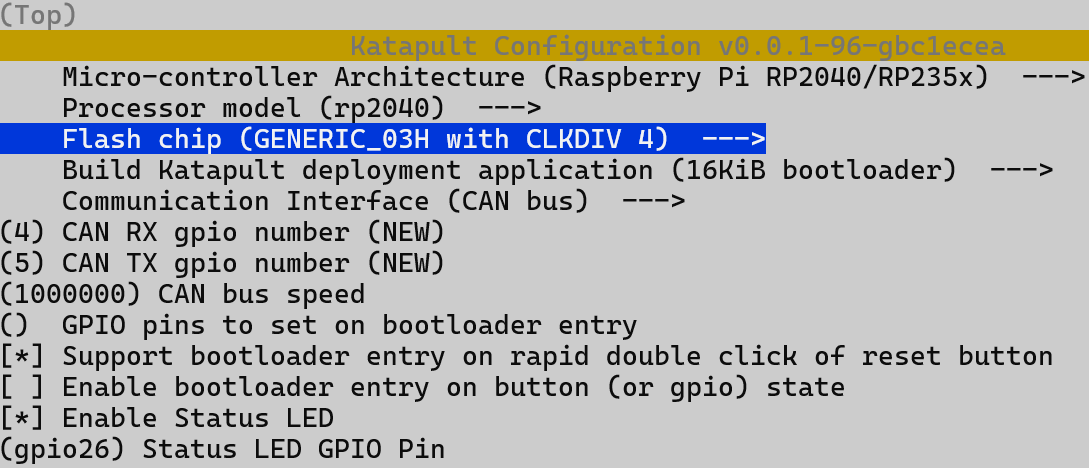
make menuconfig
并按照下图配置
3、输入make编译固件,当make执行完成后会在home/biqu/Katapult/out文件夹中生成我们所需要的‘katapult.uf2’固件,在SSH软件左侧可以直接下载到电 脑中;

4、请按住Boot按钮,然后使用Type-C线连接至树莓派/CB1,此时芯片进入DFU模式
5、在SSH终端命令行中输入 lsusb 查询DFU设备ID

6、请输入以下命令以烧录Katapult
make flash FLASH_DEVICE=2e8a:0003
其中“2e8a:0003”需替换为上一步中查询到的实际设备ID
7、烧录完成后,请拔下Type-C数据线。
编译Klipper固件¶
1、SSH连接到CB1/树莓派后,在命令行输入:
cd ~/klipper/
make menuconfig
使用下面的配置编译固件(如果没有下列选项,请更新Klipper固件源码到最新版本);
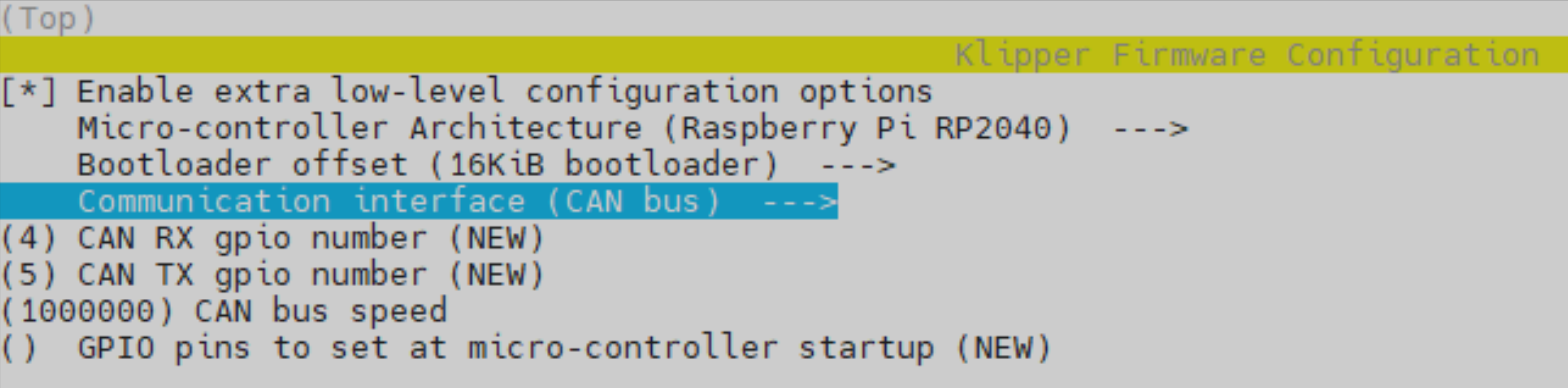
[*] Enable extra low-level configuration options Micro-controller
Architecture (Raspberry Pi RP2040) --->
如果不使用Katapult:
Bootloader offset (No bootloader) --->
Flash chip (GENERIC_03H with CLKDIV 4) --->
如果使用Katapult:
Bootloader offset (16KiB bootloader) --->
如果使用Type-C上的USB通信:
Communication interface (USB) --->
如果使用CANBus通信:
Communication interface (CAN bus) --->
(4) CAN RX gpio number
(5) CAN TX gpio number
(1000000) CAN bus speed
2、配置选择完成后,输入‘q’退出配置界面,当询问是否保存配置时选择“Yes”;
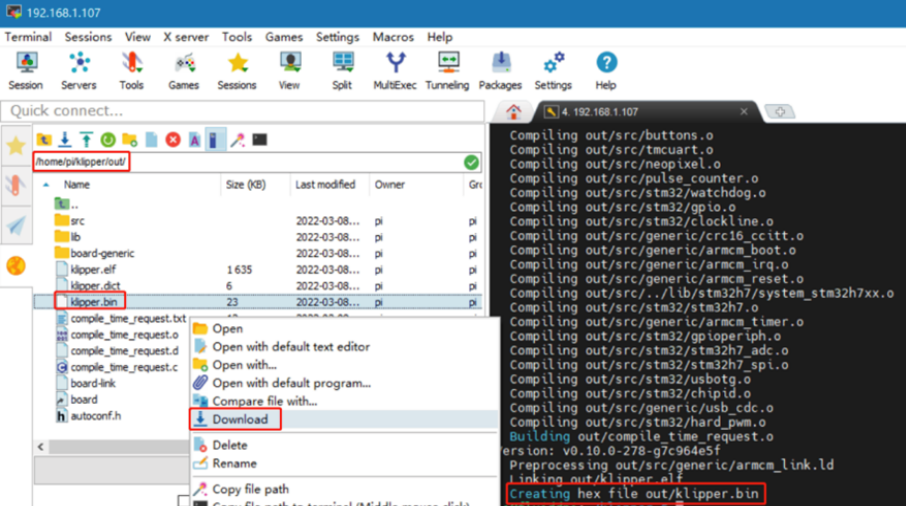
3、输入make编译固件,当make执行完成后会在home/pi/klipper/out文件夹中生成我们所需要的‘klipper.bin’固件,在SSH软件左侧可以直接下载到电脑中
通过KATAPULT进行固件更新¶
1、使用CANbus需要接好CANbus线缆以及插上120R终端电阻的跳线帽。
2、输入
然后输入
查询canbusID(需提前接好CAN线并通电),如下图已找到设备的UUID

3、输入
替换为实际的UUID,注意:klipper.bin需要提前make生成出来,并且Katapult的Applicationstartoffset为16KiBoffset,所以Klipper的menuconfig中Bootloaderoffset也要为16KiBbootloader,如下图已经烧录成功。

4、再次输入
查询,此时Application由之前的Katapult变为Klipper,代表Klipper已经正常运行

通过DFU进行固件更新¶
树莓派或CB1通过DFU更新:
1、请按住Boot按钮,然后使用Type-C线连接至树莓派/CB1,此时芯片进入DFU模式。
2、在SSH终端命令行中输入 lsusb 查询DFU设备ID

3、输入 cdklipper 跳转到klipper目录下,输入
开始烧录固件(注意:将2e8a:0003更换为上一步中查询到的实际的设备ID)
4、固件烧录完成后,输入
查询设备的SerialID(只有通过USB通信的方式才会有此ID,CANBus方式忽略此步骤)。
5、如果使用USB通信,第一次烧录完成之后,再次更新时无需手动按Boot按钮进入DFU模式,可以直接输入
烧录固件(注意:将/dev/serial/by-id/xxx更换为上一步中查询到的实际的ID)。
6、如果使用CANbus通信,烧录完成后,请拔下Type-C数据线。
CANbus配置¶
搭配BIGTREETECHU2C模块使用:
1、在SSH终端中输入
命令,新增以下内容:
将CANbus速度设置为1M(必须与固件中设置的速度一致(1000000) CANbus speed),修改后保存(Ctrl+S)并退出(Ctrl+X),输入
重启树莓派。
2、CANBus上的每个设备都会根据MCU的UID生成一个canbus_uuid,要查找每个微控制器设备ID,请确保硬件已通电并正确接线,然后运行:
3、如果检测到未初始化的CAN设备,上述命令将报告设备的canbus_uuid:
4、如果Klipper已经正常运行并且连接到此设备,那么canbus_uuid将不会被上报,此为正常现象。
配置Klipper¶
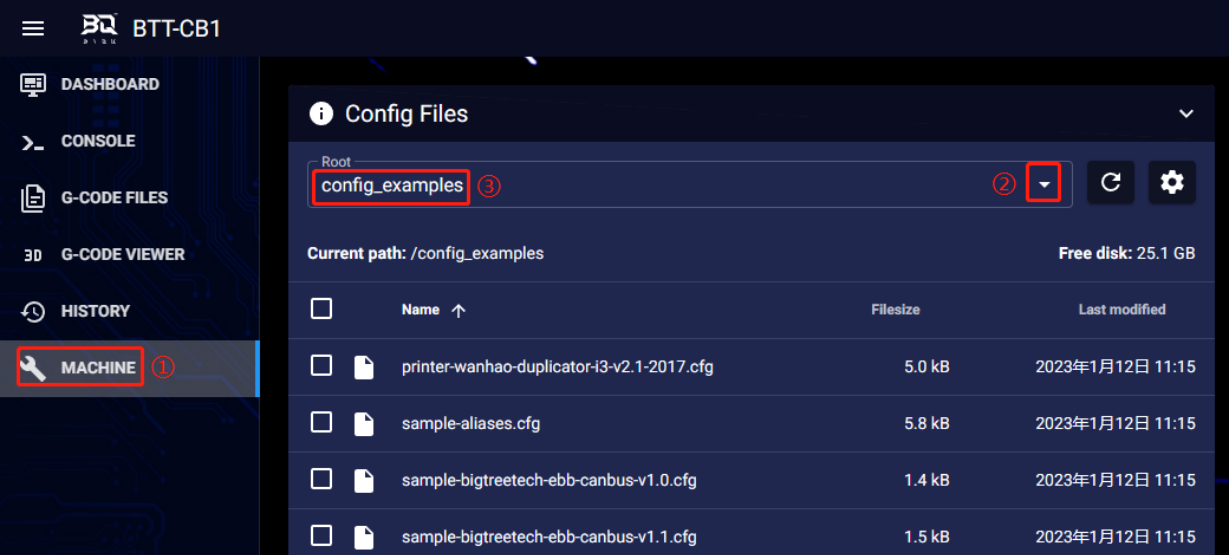
1、在电脑的浏览器中输入树莓派的IP访问,如下图所示的路径中下载名为“sample-bigtreetech-hermit-crab-2-canbus.cfg”的参考配置,如果找不到此 文件,请更新Klipepr固件源码到最新版本,或者到GitHub下载:
GitHub: https://github.com/bigtreetech/HermitCrab
2、将主板的配置文件上传到ConfigurationFiles中:

3、并在“printer.cfg”文件中添加此主板的配置:
[include sample-bigtreetech-hermit-crab-2-canbus.cfg]
4、将配置文件中的ID号修改为主板实际的ID(USBserial或者canbus)
5、按照下方链接的说明配置模块的具体功能:
https://www.klipper3d.org/Overview.html
注意事项¶
1、使用CAN通讯时,需要看是否用作终端,如果是终端,必须将120R位置插上跳线帽;
2、 接线时需注意线序,对照Pin图进行DIY,避免电源线接反或者接到CAN信号中去,导致模块烧毁;
3、通过USB端口烧录程序时,如果未外接电源,需将VUSB使用跳线帽短接,以便给模块提供工作电压;
4、加热棒及风扇接口负载电流不得大于最大承受电流,以防烧坏MOS管。
FAQ¶
问:加热棒、风扇端口的最大电流
答:加热棒端口最大输出电流:6A
风扇接口最大输出电流:1A,峰值1.5A
加热棒+驱动+风扇的总电流需小于9A。
问:USB接口无法更新固件
答:确保VUSB跳线帽有插入,主板上的电源指示灯正常亮起。